News
Insect Cyborgs: Towards Precision Movement
2023/10/04
Insect cyborgs may sound like science fiction, but it's a relatively new phenomenon based on using electrical stimuli to control the movement of insects. These hybrid insect computer robots, as they are scientifically called, herald the future of small, high mobile and efficient devices.
Despite significant progress being made, however, further advances are complicated by the vast differences between different insects' nervous and muscle systems.
In a recent study published in the journal eLife, an international research group has studied the relationship between electrical stimulation in stick insects' leg muscles and the resultant torque (the twisting force that makes the leg move).
They focused on three leg muscles that play essential roles in insect movement: one for propulsion, one for joint stiffness, and one for transitioning between standing and swinging the leg. The experiments involved the researchers keeping the body of the stick insects fixed, and electrically stimulating one out of the three leg muscles to produce walking-like movements.
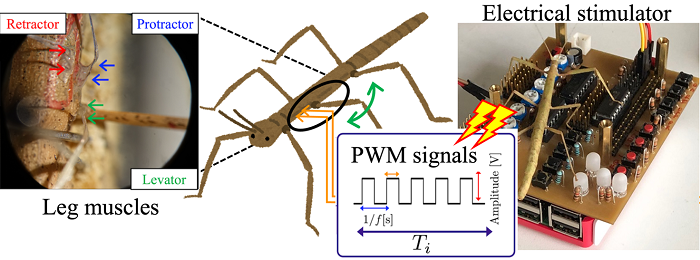
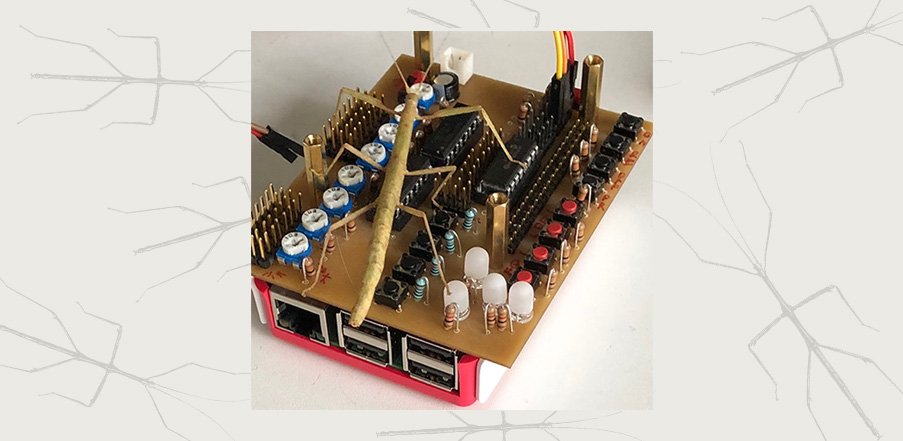
An overview of the experimental setting. Electrical signals were sent to the muscles from the developed electrical stimulation device (right), and the joint torque generated was measured using a force sensor. Electrodes were inserted inside the exoskeleton to transmit electrical stimulation to the three muscles (Protractor, Retractor, and Levator) targeted for electrical stimulation. ©Dai Owaki
The research was led by Dai Owaki, associate professor at the Department of Robotics at Tohoku University's Graduate School of Engineering. Experiments were conducted at Bielefeld University, Germany, in a lab run by Professors Volker Dürr and Josef Schmitz.
"Based on our measurements, we could generate a model that predicted the created torque when different patterns of electrical stimulation were applied to a leg muscle," points out Owaki. "We also identified a nearly linear relationship between the duration of the electrical stimulation and the torque generated, meaning we could predict how much twisting force we would generate by just looking at the length of the applied electrical pulse."
Using only a few measurements, Owaki and his collaborators could apply this to each individual insect. As a result of these findings, scientists will be able to refine the motor control of tuned biohybrid robots, making their movements more precise.
While the team knows their insights could lead to adaptable and highly mobile devices with various applications, they still cite some key challenges that need to be addressed. "First, model testing needs to be implemented in free-walking insects, and the electrical stimuli must be refined to mimic natural neuromuscular signals more closely," adds Owaki.
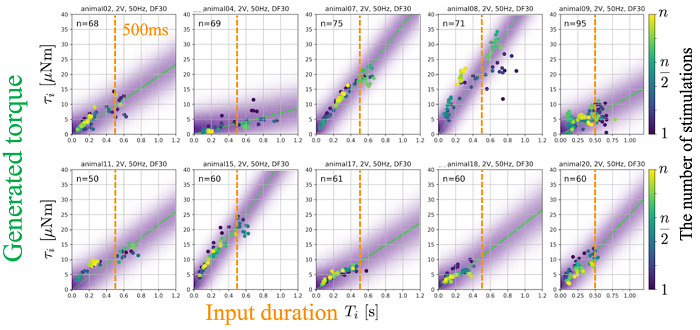
The relationship between the input time of electrical stimulation and the torque generated at the joints (the example is for the levator muscle for 10 animals), showing a linear relationship in the region up to 500 ms. The purple shading indicates the distribution predicted by the hierarchical Bayesian model. The differences between individuals are predicted with high accuracy. ©Dai Owaki
Title: A hierarchical model for external electrical control of an insect, accounting for inter-individual variation of muscle force properties
Authors: Dai Owaki, Volker Dürr, Josef Schmitz
Journal: eLife
DOI: 10.7554/eLife.85275
Contact
Division of Public Relations
School of Engineering, Tohoku University
E-mail:eng-pr@grp.tohoku.ac.jp