ソフトロボットの運動再現性を向上
- 反復学習型ニューラルネットワークにより高い制御精度を実現 -
2021/11/18
発表のポイント
- ソフトアクチュエータ注1の動的変形特性の個体差を補償し、高い制御精度と運動再現性を実現
- 応答遅れの大きいソフトアクチュエータに対する反復学習制御でニューラルネットワークを生成
- 学習に使用された訓練データとは異なる新しい軌道に対しても追従制御を達成する一般化学習に成功
概要
人工筋肉などの分野でソフトアクチュエータが注目されています。しかし、精確な制御が難しいという特徴があり、特に、ソフトアクチュエータをシリコン素材から手作業で制作する際に発生する材料変形特性の個体差は制御性能の低下を招き、入力が同じでも微妙に異なる変形結果となることが知られています。先行研究ではこのような問題に対しフィードバック制御などが採用されてきましたが、応答の時間遅れが大きいソフトアクチュエータに対する応用は難しいという課題がありました。東北大学工学研究科の杉山拓氏(博士前期課程2年)、林部充宏教授らの研究グループは、そのような応答遅れの大きいソフトアクチュエータに対するフィードフォワード学習制御手法を提案しました。反復学習制御とニューラルネットワークを組み合わせた学習制御手法を用いることで、ソフトアクチュエータの動的変形特性を考慮した個体差補償と一般化された軌道に対する高い制御精度を実現しました。この成果は、ソフトロボットの欠点を補い課題であった運動再現性の確保につながり、その実用化への貢献が期待できます。
本成果は、2021年11月2日付で学術誌「Bioinspiration & Biomimetics」に掲載されました。
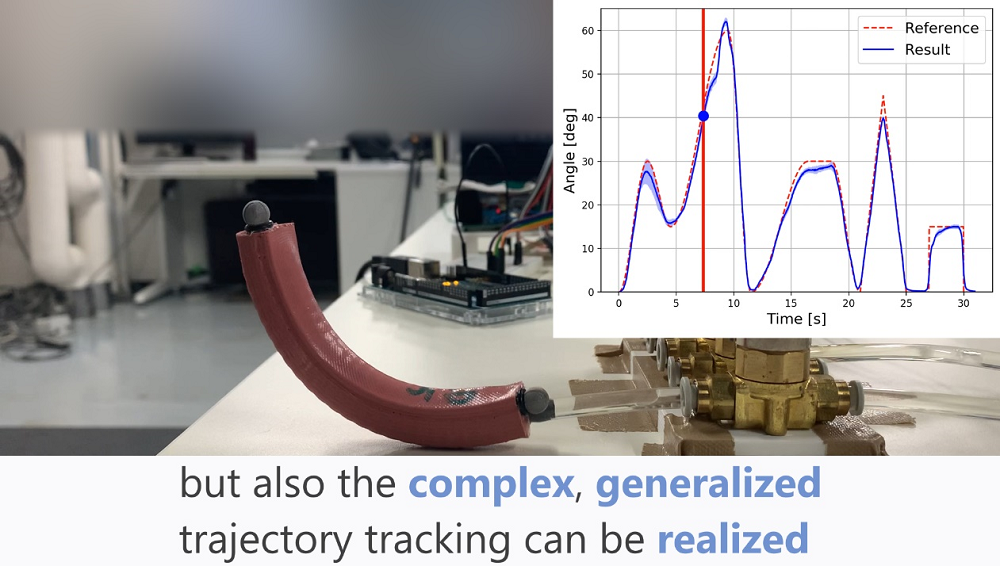
ソフトアクチュエータが学習後新しい軌道に対して追従している様子
関連動画
Individual deformability compensation of soft hydraulic actuators through iterative learning
研究の背景
「やわらかいロボット」、ソフトロボットについて研究するソフトロボティクスが近年注目を集めています。ソフトロボットは、人間や環境との接触における適応性(やわらかさによって環境に上手く馴染むことができる)や、安全性の面で秀でています。しかしながら、ソフトロボットに不可欠であるソフトアクチュエータには制御の難しさという課題があります。特に、ソフトアクチュエータを手作業で制作するとその変形特性の個体差が大きくなってしまい、シンプルな制御器では制御性能が低下してしまうという問題点がありました。
研究の内容
本研究では、3つの層を持つフィードフォワードニューラルネットワーク(FNN)注2に対してソフトアクチュエータの逆モデル(制御の目標値を入力として受け取り、それを実現するための制御入力を出力するモデル)を学習させました。そして、FNNの訓練データとして、反復学習制御手法(ILC)を用いて同じソフトアクチュエータに単純な軌道を追従させた際の結果を使用しました。ILCは、ソフトアクチュエータ個別の変形特性を反復的に学習することで目標軌道の追従を実現します。そのため、制御結果には対象の変形特性に対してどのような制御入力を行えば目的の動作が実現できるのかということに関する情報が含まれています。この制御結果を訓練データとして用いることで、FNNはソフトアクチュエータ個別の変形特性を効率的に学習することができます。さらに、FNNへの入力を時系列データとすることで、ソフトアクチュエ-タが持つ応答遅れの特性も含めて逆モデルを学習することができます。
図1は、異なる変形特性をもつ4つのソフトアクチュエータ(図2)をILCで制御した結果を表しています。この図から、ILCがそれぞれ異なるソフトアクチュエータの変形特性を学習できていることが読み取れます。そして、この制御結果を訓練データとして使用した学習済みFNNを用いた際の制御結果を図3に示します。この図から、提案手法を用いることで、ソフトアクチュエータの個体差を補償しつつ精度の良い追従制御可能なことが分かります。特に、訓練データとは異なる一般化された複雑な軌道の追従をフィードフォワード制御手法で精度良く行えたことは特筆に値します。
本研究は科学研究費補助金 (新学術領域) 超適応プロジェクト(B05-01)20H05458 の支援を受けて行ったものです。
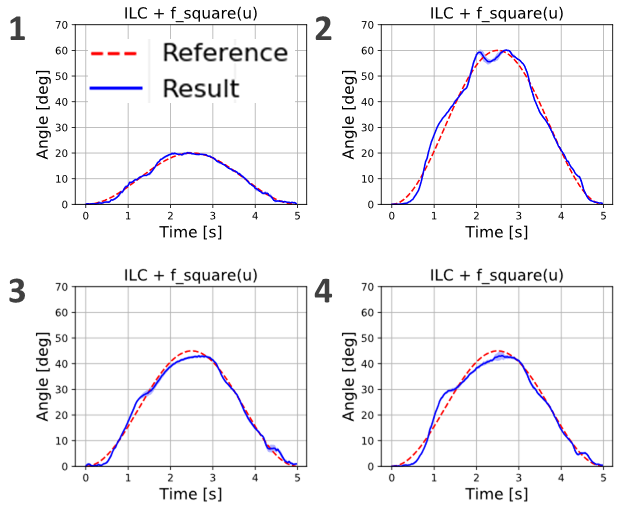
図1 反復学習制御によるソフトアクチュエータの制御結果
左上の番号はソフトアクチュエータの番号(図2)を表す
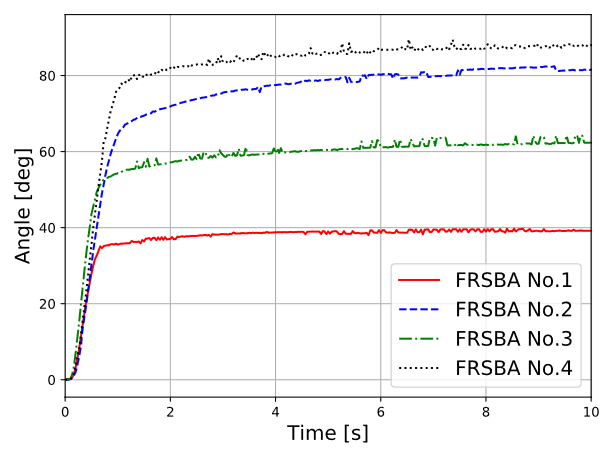
図2 使用した4つのソフトアクチュエータのステップ応答が全て異なる様子
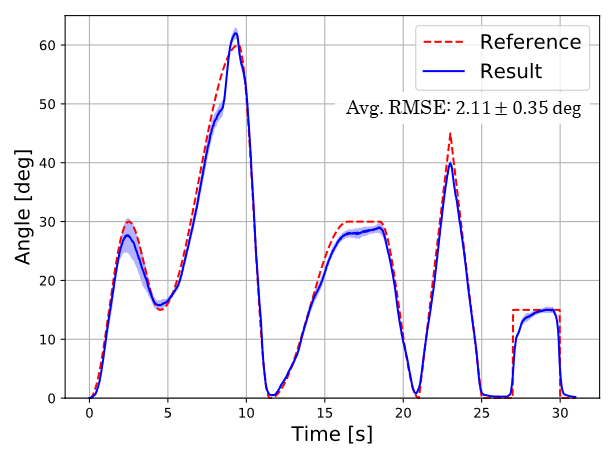
図3 学習済みネットワークによるソフトアクチュエータ(FRSBA No.4)の制御結果
研究の意義・今後の展望
本研究は応答遅れの大きいソフトアクチュエータに対して、個体差補償と高い制御精度、そして一般化された軌道への追従を達成した初めての研究であり、その学術的意義は高いと言えます。本研究はソフトロボットの実用化の際の運動再現性の確保への貢献が期待でき、実用的・社会的意義も大きいと考えられます。今後は複数のソフトアクチュエータや、ソフトとハードのハイブリッドロボットへの拡張が重要であると考えられます。
用語解説
注1 ソフトアクチュエータ
機械を動かすための駆動源のことをアクチュエータといい、ソフトアクチュエータは従来の電気モーターを利用した動力源とは異なり、材料そのものが変形する性質を利用した動力源かつ駆動源であるという特徴がある。
注2 フィードフォワードニューラルネットワーク(FNN)
ネットワークにループする結合を持たず、入力ノード→中間ノード→出力ノードというように単一方向へのみ信号が伝播する単純な構造の人工ニューラルネットワークモデルである。
論文情報
著者: Taku Sugiyama, Kyo Kutsuzawa, Dai Owaki, Mitsuhiro Hayashibe
掲載誌: Bioinspiration & Biomimetics, Nov 2021, 16, 056016
DOI: 10.1088/1748-3190/ac1b6f
URL: https://iopscience.iop.org/article/10.1088/1748-3190/ac1b6f
お問合せ先
東北大学大学院工学研究科 ロボティクス専攻 教授 林部 充宏
TEL:022-795-6970
E-mail:mitsuhiro.hayashibe.e6@tohoku.ac.jp
