高速な空気の流れをリアルタイム計測 従来比20倍速を実現
- 変化する流体に呼応するアクティブ制御に期待 -
2022/08/30
発表のポイント
概要
空気や水などの流体の流れの速度場の計測は、現象の理解やその制御のために重要です。特に流体の中でリアルタイムに何が生じているかを把握し、制御することが期待されています。流体の流速の計測によく用いられる方法として、流速の面情報が得られる粒子画像流速計測法(PIV)があります。しかし、画像解析技術を基にした計測方法のため、高速な空気の流れでは画像解析に多くの時間がとられ、リアルタイム計測ができませんでした。
東北大学大学院工学研究科の野々村拓准教授、産業技術総合研究所省エネルギー研究部門の中井公美研究員(元東北大学特任助教)らの研究グループは、この課題を解決するため、2021年に「低次元モデル」注3と「センサー位置最適化技術」注4を組み入れた疎点解析粒子画像流速計測法(スパースプロセッシングPIV)を提案しています。この度、リアルタイム高速度カメラを組み込んだ風洞実験装置を製作し、実際にリアルタイム計測が可能であることを実証しました。
この技術には汎用性があり、画像解析などを伴う解析時間がかかる計測手法に対して低次元モデルと最適化を組み合わせることで解析するデータ量を減らして処理時間を短縮できることから、流体力学に留まらず様々な分野でのリアルタイム計測とそれに基づく制御が可能になると期待されます。
本研究成果は、2022年8月29日にドイツの科学誌「Experiments in Fluids」のオンライン版で公開されました。
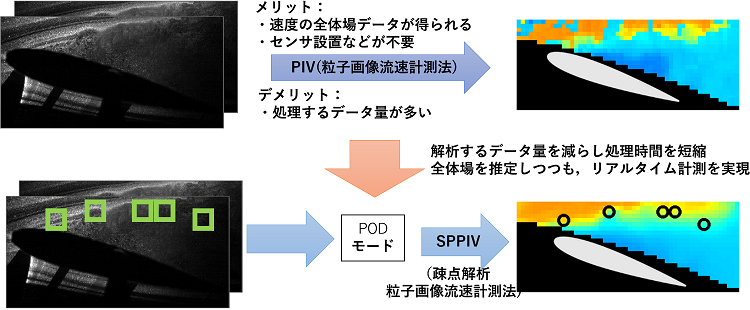
図1 疎点解析粒子画像流速計測法(スパースプロセッシングPIV)の概要
上:PIV(粒子画像流速計測法)
下:スパースプロセッシングPIV(疎点解析粒子画像流速計測法)
詳細な説明
空気や水などの流体は様々な機器で利用されており、その流れの制御による機器の効率化は今後の低炭素社会の実現に向けて非常に重要であると考えられています。流れ場の制御は、素材や形状の変化による受動的なものから、アクチュエータを利用した能動的なものまであり、特にプラズマアクチュエータ注5など入力信号に対してすぐに動作できる能動的なアクチュエータを用いて、流れ場の時々刻々の変化に応じて入力を切り替えながら、効率的な制御を実現するフィードバック制御が大きく期待されています。流れ場の様子はセンサーなどでも把握できますが、センサーが反応する流れ場の変化は局所的で全体像が見えづらく、フィードバック制御に必ずしも適していません。流れの速度全体の計測によく用いられる方法として、粒子画像流速計測法(PIV)があり、流れの速度の面情報が得られることからよく用いられる手法となっています。しかしPIVは画像解析技術を基にした計測方法のため、高速な空気の流れでは画像解析に多くの時間がとられ、リアルタイム計測ができていませんでした。
これまで東北大学大学院工学研究科の野々村拓准教授らの研究グループは、このPIVに対して、圧縮センシングにより流れ場の大きな構造を表現する低次元モデルを導入し、全体場の再構成に適した画像の一部のみを解析、低次元モデルのパラメタを推定することで、全体場を再構成する疎点解析粒子画像流速計測法(スパースプロセッシングPIV)を提案してきましたが、この度、フォトロン社のリアルタイム高速度カメラIDP-Express R2000を組み込んだ風洞実験装置を組み上げ、リアルタイム計測が可能であることを実証しました。
本技術は、データによく現れるパターンを抽出する固有直交分解(POD)モードの低次元モデルで速度場を表現し、センサー位置最適化技術を利用して選んだ低次元モデルに対して感度の高い点を解析し全体場の推定を行います。このように限られた点のみの解析とすることで計算時間などがボトルネックとなりリアルタイム計測ができなかったPIVのリアルタイム化を実現しています(図1)。この際に、研究グループが持つ感度の良い点を探すセンサー位置最適化技術のうち、一つのセンサー点で複数の情報が得られるベクトル型センサーのためのセンサー位置最適化技術を利用しています。このリアルタイム化されたPIVを飛行機などの翼周りの流れに適用し、リアルタイムに流れ場が観測できることを世界で初めて実証しました。
従来のPIVでは画像解析にかかる時間から100Hz程度まででのリアルタイム流れ場計測が限度でしたが、本研究で提案するスパースプロセッシングPIVでは2000Hzでのリアルタイム計測が可能となり、高速な空気の流れなどにも適用できます。研究グループは、この技術を用いて高速流れのリアルタイムアクティブ流体制御に取り組もうとしています。
この技術には汎用性があり、画像相関解析などを伴う解析時間のかかる計測手法に対して低次元モデルと最適化を組み合わせることで、流体力学に限らず様々な分野で計測のリアルタイム化が実現でき、計測に基づく制御が可能になると期待されます。
本研究は科学技術振興機構(JST)創発的研究支援事業(JPMJFR202C)、戦略的創造研究推進事業(CREST:JPMJCR1763、ACT-X:JPMJAX20AD)および科学研究費補助金(20H00279、21H04586)の支援により行われました。
用語説明
(注1)疎点解析粒子画像流速計測法(スパースプロセッシングPIV)
2021年7月に研究グループが提案した、少数の疎な解析点でのみ粒子画像流速計測法を実施し、リアルタイムに全体場を推定する方法。低次元モデルとセンサー位置最適化技術を活用している。通常の粒子画像流速計測法では粒子の発光にレーザー、撮像に高速度カメラを利用するが、疎点解析粒子画像流速計測法ではレーザーとリアルタイム高速度カメラを利用する。
“Feasibility study on real-time observation of flow velocity field using sparse processing particle image velocimetry”, Transaction of Japan Society of Aeronautics and Space Sciences, 2021 Volume 64 Issue 4 Pages 242-245,
https://doi.org/10.2322/tjsass.64.242
(注2)粒子画像流速計測法(PIV)
流体中に含まれる粒子を撮像した粒子画像により、非接触で2次元平面内の速度および方向を求める流体計測手法である。一般的に画像相関解析を用いて粒子群の移動量を求めるため、解析に時間がかかる。
(注3)低次元モデル
本来複雑な現象をその大まかな特徴に限定して表現するように簡略化したモデル。大勢に影響の小さい詳細な情報を切り捨てる代わりに、計算コストを下げることができる。
(注4)センサー位置最適化技術
センサー位置最適化モデルに対して、感度の高い観測点の組み合わせを選択する方法。厳密には組み合わせ問題となり、計算量爆発を起こすため、問題を緩和して実用的な観測点の組み合せを探す。
(注5)プラズマアクチュエータ
イオン風を利用して流体機器周りの流れを制御する装置。通常は2枚の電極と誘電体で構成され、交流の高電圧を印加することによって空気をイオン化し、イオン風を発生させる。プラズマアクチュエータは航空機の翼周り流れのはく離制御や摩擦抵抗の低減などへの応用が期待されている。

図2 実験セットアップ
論文情報
著者: Naoki Kanda, Chihaya Abe, Shintaro Goto, Keigo Yamada, Kumi Nakai, Yuji Saito, Keisuke Asai, Taku Nonomura
筆頭著者: 神田直樹(東北大学大学院工学研究科博士前期課程 修了)
掲載誌: Experiments in Fluids 63, Article number: 143 (2022)
DOI: 10.1007/s00348-022-03471-0
URL: https://doi.org/10.1007/s00348-022-03471-0
