昆虫の個体差に依存しないシンプルな筋力制御
- 昆虫サイボーグロボットの実用化に期待 -
2023/09/28
発表のポイント
概要
近年、災害現場での捜索活動などでの活用を目的とした、昆虫の卓越した運動能力と電子部品などを組み合わせた「昆虫ハイブリッドロボット(サイボーグ)」の研究が注目されています。
東北大学大学院工学研究科の大脇大(おおわきだい)准教授はドイツのビーレフェルト大学との共同研究で、昆虫サイボーグの運動制御のための基礎的研究の一環として、ナナフシの脚筋に電気刺激を与え、その刺激に応じて筋肉が発生する力とそれに対応する関節トルクの変化を評価しました。その結果、電気刺激の入力時間と生成される関節トルクとの間には線形関係があることを確認し、ナナフシの関節トルク生成において個体間で見られる共通の特性と個体差による変動の特性を明らかにしました。この成果により、シンプルなアルゴリズムによる個体差に依存しない昆虫の筋力制御が可能になります。この知見は、昆虫の歩行メカニズムの理解と昆虫サイボーグ技術の発展に役立つと考えられます。
本研究成果は、2023年9月13日(日本時間9月14日)に生物学分野の専門誌eLifeに掲載されました。
研究の背景
近年、災害現場での捜索活動などを目的として、昆虫の卓越した運動能力と電子部品などを組み合わせた「昆虫ハイブリッドロボット(サイボーグ)」の研究が注目されています。微細加工技術の革新(マイクロエレクトロニクス、マイクロファブリケーション、マイクロアクチュエータ注7)により、昆虫の生体とロボットを融合させる技術が発展し、運動や飛行の操作および制御を目指す研究が注目されています。この革新的な昆虫サイボーグは、昆虫に備わった機能を利用することで、ロボット開発のための部品の設計や製造を簡素化できます。さらに、昆虫サイボーグは消費電力が数ミリワットとエネルギー効率の面で非常に優れているなどのメリットがありますが、まだ研究の初期段階にあり課題もあります。なかでも、昆虫の個体差による変動(個体間変動)による影響は大きな課題です。
今回の取り組み
個体間変動の課題を克服する有望なアプローチは、昆虫の運動制御における個体間変動を規定する原理を理解することです。筋肉は神経活動を運動に変換し、環境との相互作用から行動を生成するための鍵となる器官です。本研究では、昆虫サイボーグの運動を精緻に制御するための基礎的研究として、外部からの筋肉への電気刺激に応じて、筋肉が収縮することで発生する力とそれに対応する関節トルクがどのように変化するかを系統的に評価することを目的としました。 この目的のため、ナナフシを対象の実験動物として採用し、中脚にある3つの脚筋(前引筋:Protractor muscle, 後引筋:Retractor muscle, 挙筋:Levator muscle)のうちの1つを刺激して誘発される関節トルクを測定しました。これら3つの脚筋は歩行生成に必須の筋群で、前引筋は歩行時の推進力の要であり、前引筋と後引筋は関節の硬さを調節することで歩行中の姿勢調節を担い、挙筋は立脚相注8の終了と遊脚相注8の開始(離地)に寄与します。パラメータの調整が可能なパルス幅変調(Pulse Width Modulation: PWM)信号注9を生成する電気刺激装置を開発し、昆虫の運動ニューロン注10の活動を模擬した電気信号に反応して発生する関節トルクを測定しました(図1)。
その結果、PWM信号の入力継続時間と発生する関節トルクの間に区分的に線形な関係が観察されました(図2)。この線形関係が維持される時間領域は、中速から高速で歩行するナナフシの立脚相(300~500ms)と遊脚相(~250ms)に相当する時間領域です。ベイズ統計モデリング注11とモデル予測評価のためのWAIC(広く使える情報量基準)指標注12を用いて、6つのモデル(単純線形モデル、階層線形モデル、単純非線形モデル、3つの階層非線形モデル)を評価し、実験データを最もよく説明する筋肉特性のモデルを特定しました。特に、個体間変動を考慮した階層ベイズモデル注13と個体間変動を考慮しない非階層ベイズモデルの予測性能を評価しました。その結果、ナナフシの関節トルク生成における個体横断的に共通する関節トルク出力特性と個体間変動を説明できるパラメータの存在が明らかになりました。
今後の展開
本研究により明らかとなった昆虫の筋肉特性のモデルは、昆虫の歩行、特に脚の運動や脚間の協調に関するさらなる理解の鍵となります。この知見を基盤として、昆虫の歩行メカニズムの謎を明らかにし、新たな歩行ロボット技術の道を切り拓くことが期待されます。構築された歩行制御法を無線搭載マイクロコンピュータ注14に組み込むことで、昆虫を自在に制御できる超省エネバイオハイブリッドロボットの実現に貢献できると考えています。この試みは、ロボットの設計・生産コストを大幅に削減し、生体昆虫を使用した先進的なサイボーグロボットの実現に繋がります。また、人が行けないような場所での災害時の捜索活動や環境調査など、従来のロボット技術では困難であった状況での活用が期待されます。さらに、サイボーグ昆虫による農業支援、生態系安定化など、持続可能な開発目標(SDGs)や、環境問題への取り組みにも寄与する可能性を秘めています。
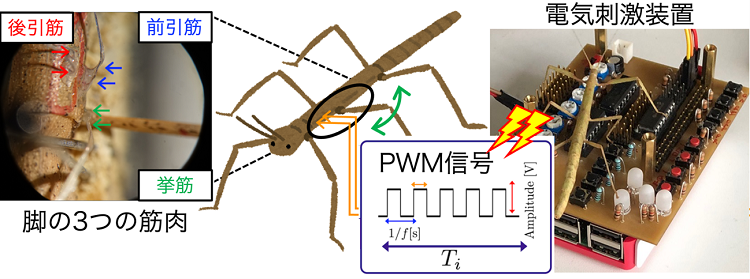
図1 (図右)実験環境の外観図。開発した電気刺激装置からナナフシの筋肉へ電気信号を送信し、発生する関節トルクを力センサーを用いて計測。(図左)電気刺激の対象とした3つの筋肉(前引筋, 後引筋, 挙筋)に電気刺激を送信するため電極を外骨格注15内部に挿入。(図中央下)神経信号を模擬したPWM信号。
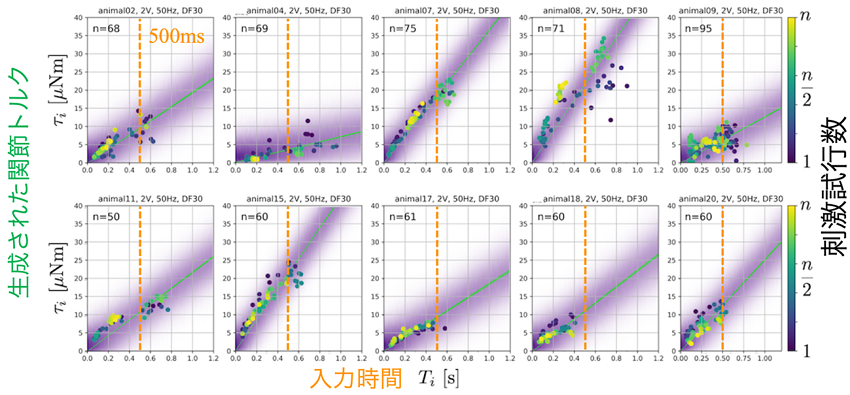
図2 電気刺激の入力時間と関節で発生したトルクの関係(挙筋の例, ナナフシ10匹分のデータ)。500msまでの領域で線形的な関係を示した。紫の濃淡は階層ベイズモデルによる予測分布を示す。個体間の差を精度良く予測できている。
謝辞
本研究はJSPS科研費 新学術領域研究JP21H00317、国際共同研究加速基金JP17KK0109、基盤研究(A)JP23H00481、および公益財団法人立石科学振興財団2023年度研究助成(A)2231006 (いずれも研究代表者:大脇大) の助成を受けたものです。
用語説明
(注1)ナナフシ
ナナフシ目に属する昆虫の総称。草食性で、木の枝に擬態する。「七節」の「七」は単に「たくさん」という程度の意味で、実際に体節を7つもっているわけではない。実験対象のナナフシの学名はCarausius morosus(De Sinéty, 1901)。
(注2)筋肉
昆虫を含む動物が動くための体の筋組織。昆虫の筋肉は非常に小さく、特有の動きや力を生成。
(注3)関節トルク
関節を回転させる力の回転方向と大きさを示す指標。関節のまわりに配置されている筋肉が収縮することで関節トルクが発生する。
(注4)線形関係
2つの要因が直線的な関係を持つこと。一方の要因が増加すれば、もう一方も一定の割合で増減する、というシンプルな関係を指す。
(注5)個体差(個体間変動)
同じ種類の生物でも、個々に異なる特性や反応を持っていること。人間では、体質や性格の違いなどに相当する。
(注6)昆虫ハイブリッドロボット(サイボーグ)
生物の昆虫と電子機械を組み合わせて作られたロボット。昆虫の自然な動きとロボット技術の組み合わせることで、新しい機能や動きが実現される。
(注7)マイクロエレクトロニクス、マイクロファブリケーション、マイクロアクチュエータ
微小な電子部品やデバイスの製造技術に関する用語。超小型の機器やシステムの作成に用いられる。スマートフォンには、これらの技術が駆使された部品が数多く使用されている。
(注8)立脚相、遊脚相
歩行動作において足が地面についている期間を立脚相、足が空中にある期間を遊脚相という。
(注9)パルス幅変調(Pulse Width Modulation: PWM)信号
電子信号の「オン」や「オフ」の間隔を調節する技術。これにより、電気の強さやLEDの明るさ、サーボモータなどを簡単に制御できる。
(注10)昆虫の運動ニューロン
昆虫が動くために関与する神経細胞。筋肉(筋繊維)を収縮させるための信号を生成。
(注11)ベイズ統計モデリング
既知の情報(事前の知識)を基に新しいデータを解釈・予測する統計的手法。新しい情報を加えることにより、その解釈・予測が更新されるため、データに柔軟に対応することが可能。
(注12)WAIC(広く使える情報量基準)指標
統計モデルの予測・説明能力を評価する指標の一つで、モデルがデータをどれだけうまく説明できるかを示す。
(注13)階層ベイズモデル
複数のデータ層を持つ統計モデルで、それぞれの層が互いに影響を及ぼすことを考慮してデータを解析する。本研究では、個体差を階層性としてモデル化した。
(注14)マイクロコンピュータ
電気機器を制御するための小さなコンピュータ。家電製品や産業機械など多くの電気機器に制御用コンピュータとして組み込まれている電子部品。
(注15)外骨格
昆虫の外骨格は、昆虫の体を覆っている硬い殻のようなもので、体を保護し、形を維持する役割を持つ。人間の骨が体の内部にあるのに対し、昆虫は体の外部にこの「骨」を持っている。
論文情報
著者: Dai Owaki*, Volker Dürr, Josef Schmitz
*責任著者: 東北大学大学院工学研究科 准教授 大脇大
掲載誌: eLife
DOI: 10.7554/eLife.85275
