自分で集合と散開をする群体分子ロボットを開発
- 病気の自動的なピンポイント診断と治療への適用に期待 -
2024/06/03
発表のポイント
概要
「分子ロボティクス」と呼ばれる生体内外で狙った働きをさせることで病気の治療や診断に役立つ分子ロボットの研究開発分野に注目が集まっています。
東北大学大学院工学研究科の野村 M. 慎一郎准教授と川又生吹助教(現、京都大学大学院理学研究科准教授)、大学院生の西山晃平氏(現、独ヨハネス・グーテンベルク大学マインツ在籍)、京都大学大学院理学研究科の角五彰教授らは、無数の分子ロボットを望み通りに動作させることにつながる分子制御技術を開発しました。角五教授らのこれまでの研究で、ばらばらに滑走して運動するタイプの分子ロボット(注3)を外部からの操作により、群体として組み立てたり、解体させたりすることに成功していました。本研究では、人工的に設計したDNAと酵素からなるDNA回路で構成された「分子コントローラー」を構築し、分子ロボットに共存させることで、プログラムに従い自ら組み立て・分解をする分子システムの開発に成功しました。本技術は、分子ロボティクスの分野において大きな前進であり、将来的な分子ロボットの利用や医療応用などへの実用化に向けた重要な一歩となります。
本研究成果は、2024年6月1日(日本時間)に科学誌Science Advancesに掲載されました。
研究の背景
近年、分子ロボティクスと呼ばれる分野に注目が集まっています。これは人工的に設計された分子デバイスを組み合わせ、分子信号を介して統合動作させることで、自律的に動作する分子システムを実現しようとする新しい研究領域です。
現在までに様々な分子ロボットが提案されており、中でも個々の分子が運動しつつ群れを形成する「ばらばらに滑走するタイプ」の分子ロボットは、指向性と制御性が高いことから注目されています。基板に固定されたリニア分子モーター(注4)であるキネシンと、そのキネシンによって滑走運動する細長い微小管分子、そして微小管に修飾した人工設計DNA分子の組み合わせで構成されており、特定のDNA分子を加えることで、群体として巨大な束状に組み立てさせたり、逆に分解させたりすることができます。また、分子ロボットで荷物を輸送し、目的の場所で荷下ろしすることにも成功しています(DOI: 10.1126/scirobotics.abm0677)。
しかし、それらの命令を与えるためには、DNA分子の添加や光照射などの、外部からの操作が必要でした。特に体内で活用したい分子ロボットには、外部からの信号が届かない微小な環境でタスクを実行することが期待されています。群体の集合や分解も、分子ロボットが活動するその場での分子の状況にしたがって自動的に行われることが望まれています。
今回の取り組み
今回、東北大学大学院工学研究科の野村M. 慎一郎准教授と川又生吹助教(現、京都大学大学院理学研究科准教授)、大学院生の西山晃平氏(現、独ヨハネス・グーテンベルク大学マインツ在籍)、京都大学大学院理学研究科の角五彰教授らは、DNAと酵素からなるDNA分子回路を用いて、同じ溶液の中にいる分子ロボットたちに自動的に群体を形成させ、また自動的に分解させる命令を出す「分子コントローラー」を開発しました(図1)。この分子コントローラーは、人工設計されたDNA分子と3種類の酵素で構成されており、DNA分子の配列で入力されたプログラムの逐次処理と、信号となる特定のDNA配列を増幅して出力することができます。
分子コントローラーは処理を開始すると、まず特定のDNA信号(「集まれ」という命令に相当)を出力します。分子コントローラーと同じ溶液の中にある微小管はDNAで修飾されており、キネシン分子モーターによって滑り運動をしています。微小管は運動しつつDNA信号を受け取り、運動の向きを揃えて自動的に束状の構造へと集合します。続いて分子コントローラーから出力されるのは「散れ」という分解信号で、微小管の束はその命令に従い、自動的に解体されます(図2, 動画)。この一連の動的な変化は、分子回路の精密な制御により実現されました。分子コントローラーは分子ロボットと共存しており、外部操作を必要としません。
今後の展開
この技術が発展することで、将来的により複雑で高度な自律分子システム=分子ロボットの開発に貢献することが期待されます。その結果、命令に従い集合することで単独では実行できないようなタスクを実効し、その後、命令に従い散開して標的を探索する、などの働きが可能になるかもしれません。
また、今回の研究は、DNA回路系とモータータンパク質の動作系という異なる特性をもつ分子集団を統合したことで、分子ロボットの活動条件を拡大させた成果でもあります。分子コントローラーを発展させ、近年急速に高度化かつ精緻化するDNA回路や分子情報増幅デバイス(注5)、生体分子デザイン技術などと組み合わせることで、群体分子ロボットが自動的に、より多彩な生体分子情報を処理できるようになると期待されます。その先には、分子認識と診断をその場で行うナノマシンやスマートドラッグデリバリーシステム(注6)など、ナノテクノロジーや医療分野での革新的な技術の実現が見込まれます。一例として、分子コントローラーが環境の情報をモニタリングし、薬剤を積載した分子ロボットを集合させ、狙った病原体や異常細胞に到達後、薬剤を放出することで、それらを破壊したり、あるいは組織修復を促す物質を分泌するなどの治療活動を行う分子システムが考えられます。さらに、一次ミッション完了後、一旦解散し次の指示を待つということが可能になれば、治療の幅がより広がります。
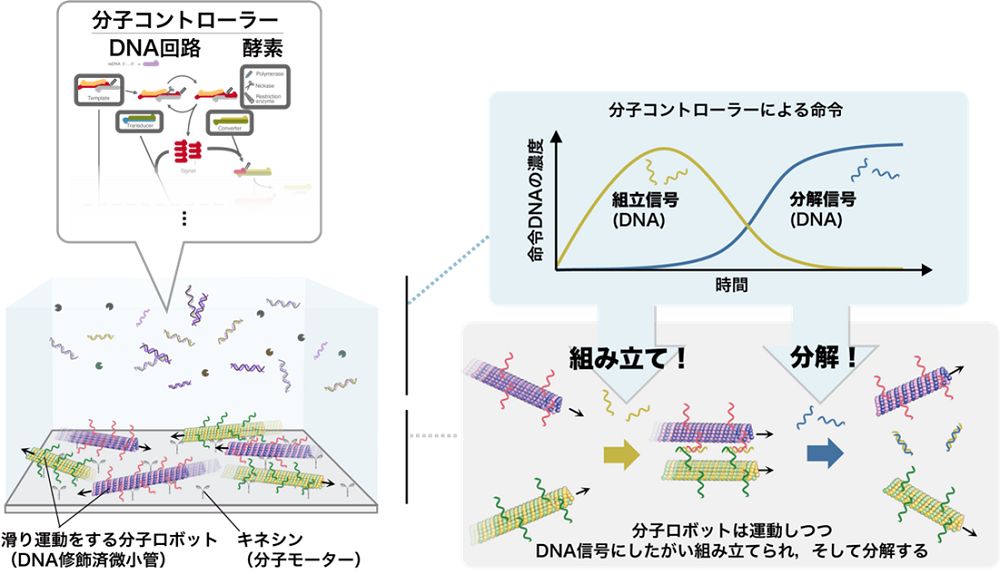
図1 分子ロボットの組み立てと分解の信号を出力する分子コントローラーの模式図
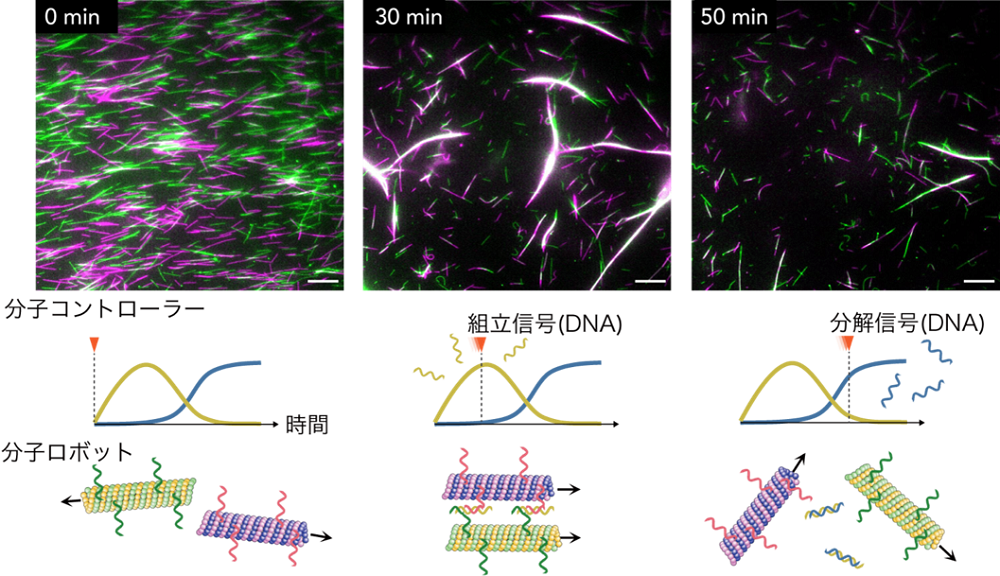
図2 自動的に組み立てられ、分解される群体分子ロボットの蛍光顕微鏡像
動画
滑走型の群れタイプの分子ロボットが、実際に束状に集合し、その後、分解していく様子(144倍速)。
左上に示した時間で00:30:00(動画で14秒程度)頃までが組み立て、00:42:00(動画で17秒程度)頃からが分解。
謝辞
本研究は、JSPS科研費JP19KK0261、JP20H05971、JP21H04434、JP22K12255、JP18H05423、JP21H04434、JP20H05701、JP20H05970、JP20H05968、JP20H00619、JP23K17485および 国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の助成事業JPNP20006の助成を受けたものです。
用語説明
(注1)分子ロボット
センサ(感覚装置)、プロセッサ(計算機)、アクチュエータ(駆動装置)などのロボットを構成するデバイスが分子レベルで設計されており、それらを一つに統合することで構成される分子のシステム。今回の分子ロボットは直径25 nm、全長約6 µmの管状の個体であり、数十µm幅の束に組み立てられ、そして分解されるシステム。
(注2)DNA回路
DNA分子の結合と解離、合成と切断を利用し特定の機能や反応を実現するために設計された分子システム(例:DOI: 10.1007/s00354-022-00156-4)。
(注3)ばらばらに滑走して運動するタイプの分子ロボット
基板に固定されたリニア分子モーターであるキネシンと、そのキネシンによって滑走運動する細長い微小管分子、そして微小管に修飾した人工設計DNA分子の組み合わせで構成されており、外部操作によって組み立て・分解を行う(例:DOI:10.1038/s41467-017-02778-5)。
(注4)リニア分子モーター
直線的な分子運動を生み出す分子モーター.化学エネルギーを運動エネルギーに変換して動作させる。細胞内での物質輸送や筋肉の収縮運動などに利用される。
(注5)分子情報増幅デバイス
ある特定の分子がもつ配列を、情報処理のための信号として使うための分子デバイス、DNAやRNAなど特定の配列をもつ分子を、酵素などを用いて増幅することで、高濃度な、より強い信号として用いることができる。
(注6)スマートドラッグデリバリーシステム
標的特異的に薬剤を届ける技術であるドラッグデリバリーシステム(DDS)に加えて、その場の状況や外部からの情報入力に応じた時空間上の振る舞いを実現することで、より効果的かつ安全に体内の特定の部位へ薬剤を届けることを目的とした技術。
論文情報
著者: Ibuki Kawamata, Kohei Nishiyama, Daiki Matsumoto, Shosei Ichiseki, Jakia J. Keya, Kohei Okuyama, Masatoshi Ichikawa, Arif M. R. Kabir, Yusuke Sato, Daisuke Inoue, Satoshi Murata, Kazuki Sada, Akira Kakugo*, Shin-ichiro M. Nomura*
*責任著者: 東北大学大学院工学研究科ロボティクス専攻 准教授 野村 M. 慎一郎
DOI: 10.1126/sciadv.adn4490
