筋骨格ロボットの筋肉冗長性を十分に活用する制御手法を開発
- 過酷な環境でも自律的に動作するロボットの実現に期待 -
2024/06/12
発表のポイント
概要
動物の動作は複数の筋肉が協力して作用することで実現されており、運動学などの分野ではこれを冗長性と言います。一部の筋肉が損傷した場合でも他の筋肉がその機能を補い、目的の動作が実現できることがありますが、これには冗長性が一役買っています。こういった動物の生体構造から着想を得た、冗長な筋肉(アクチュエータ)構成を持つ筋骨格ロボットは、可変関節剛性や筋肉の故障に対する強靭性といった利点を持ちます。一方、その複雑な構造は制御を困難なものとし、制御解が無数にあり得るため、既存手法では筋肉が破損した場合に手動の再適応学習が必要であるなど、ロボットの冗長性の利点を十分に活用できていませんでした。
東北大学大学院工学研究科の杉山拓大学院生と林部充宏教授は、英国ケンブリッジ大学のElijah Almanzor大学院生、Arsen Abdulali博士、Fumiya Iida教授らと共同で、冗長性の利点を最大限活用するためのモデルフリーの逆静力学コントローラを提案しました。筋骨格脚ロボットシミュレーションを用いた実験で、提案手法はロボットの重量変化や筋肉の故障、地面との接触などに対して再学習などの介入を一切せず自律的に適応し、妥当な制御精度を維持することに成功しました。
本研究成果は、科学誌Bioinspiration & Biomimeticsに2024年6月10日付けで掲載されました。
研究の背景
動物は冗長な筋肉から成る生体構造を活用し、不確実で複雑な実環境での適応的な動きを実現しています。この構造に着想を得た筋骨格ロボットは、関節の硬さ(剛性)の調節、筋肉の故障や変質に対する強靭性といった利点をもっています。しかしながら、そのようなシステムは構造が複雑であるため、明示的なモデル化とそれに基づいた制御が困難です。既存のモデルフリー手法はありますが、筋肉の冗長性の利点を十分に活用できていないという課題があります。例えば、筋肉が故障した際は再学習が必要となり、関節の硬さを制御するためにはパラメータを手動で調整する必要があります。そのため、特に筋骨格ロボットの冗長性の実環境での活用が制限されていました。
今回の取り組み
本研究では、ニューラルネットワークに対してロボットの逆静力学モデル、つまり目標の姿勢に対する筋肉活性化量(アクチュエータ入力)を学習させました。学習にはモーターバブリングデータ(ランダムに筋肉を活性化させてランダムにロボットを動かした時のデータ)を利用しました。学習後、ニューラルネットワークはロボットの目標姿勢と、現在の制御周期での姿勢及び筋肉活性化量を受け取ります。そして、目標姿勢を実現するために、次の制御周期における筋肉活性化量を算出します。
筋骨格脚ロボットシミュレーション(図1)を用いた実験の結果、提案手法は目標姿勢に到達するための適切な筋肉活性化量を算出し、高精度のリーチングと軌道追従に成功しました(図2)。ロボットの重量変更や地面と接触させたスクワットを実行した際には、関節の硬さを自律的に調節し、制御精度を維持することができました。さらに、筋肉が故障した場合でも、故障していない筋肉の出力を増加させることで、妥当な制御精度を維持しました。なお、先行研究とは異なり、これらの評価の際には再学習などの介入は一切不要でした。
今後の展開
本研究は筋骨格ロボットの冗長性の利点を活用し、ロボットの重量変化や筋肉の故障、地面との接触などに対して自律的に適応することを達成した初めての研究であり、その学術的意義は高いと言えます。また、本研究の成果は筋骨格ロボットの冗長性を実環境で活用することを促進し、不確実な環境における筋骨格ロボット応用への貢献が期待できます。今後の方針としては、実ロボットへの応用や、複雑な動きへの拡張が重要になると考えられます。
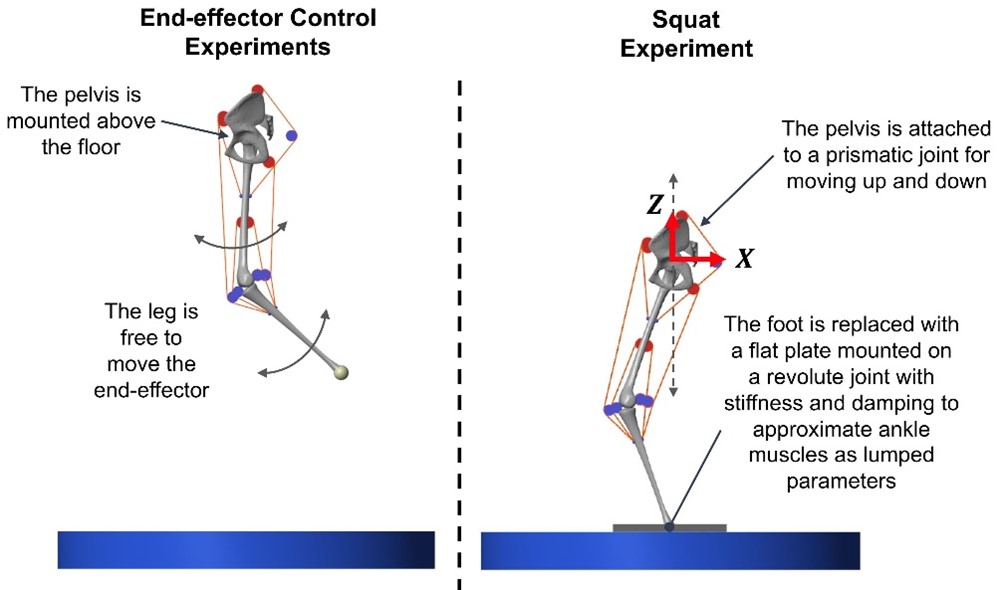
図1 シミュレーション実験に利用した筋骨格脚ロボット
(軌道追従リーチング(左)とスクワット運動(右)での制御精度検証)
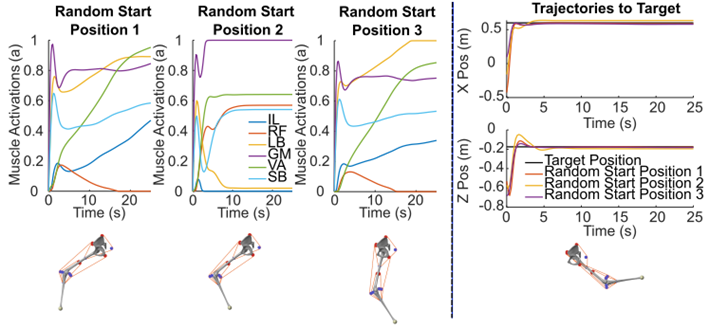
図2 脚が任意のランダムな初期姿勢でスタートした場合の、目標到達の様子と生成された筋活動度の例(左)。脚の初期姿勢に適応しながら、目標に到達するための多様な筋活動度を生成することができる(右)。これはコントローラの冗長性問題に対する適切な大域解を生成する能力を示している。
謝辞
本研究は、東北大学高等大学院機構機械科学技術国際共同大学院プログラム(GP-Mech)の支援による海外留学の実施により行われたものです。
用語説明
(注1)筋骨格ロボット
動物の筋骨格系に着想を得た、硬い骨格と柔らかい筋肉(アクチュエータ)で構成されるロボット。
(注2)ニューラルネットワーク
人間の脳内の神経細胞である「ニューロン」を語源とし、脳の神経回路の構造を数学的に表現した手法である。「入力を線形変換する処理単位」がネットワーク状に結合した数理モデルであり、人工知能(AI)の問題を解くために用いられる。
(注3)逆静力学モデル
目標のロボットの姿勢や手先の力を生成するのに必要となる筋肉アクチュエータ活動度を数式で表したもの。
論文情報
著者: Elijah Almanzor, Taku Sugiyama*, Arsen Abdulali, Mitsuhiro Hayashibe, Fumiya Iida
*責任著者: 東北大学大学院工学研究科 大学院生 杉山拓
掲載誌: Bioinspiration & Biomimetics
DOI: 10.1088/1748-3190/ad5129
