燃料不要ロケットの打ち上げ実証に成功
- レーザーで推進エネルギーを継続的に供給 -
2025/05/21
研究室ウェブサイト
発表のポイント
- 繰り返しパルスレーザー(注1)をロケットに鉛直方向に照射し、燃料を使わずに飛行するレーザー推進ロケットの打ち上げ実証に成功しました。
- 「複数放物面レーザー推進機」の開発により、飛行中の機体の動きを受動的に制御することに成功しました。
- ロケットの動きをリアルタイムで追尾しながらレーザー照射位置を調整し、推進エネルギーを継続的に供給する「レーザートラッキングシステム」の開発・実証に成功しました。
概要
地上からロケットにレーザーを照射して推進力を与える「レーザー推進」は、燃料を搭載せずに打ち上げ可能な新しい方式として注目されています。しかし、機体をレーザーの軸上に乗せ続けることが難しく、安定した飛行を実現するには課題がありました。
東北大学大学院工学研究科の高橋聖幸准教授、速館佑弥大学院生(研究当時)、大阪公立大学大学院工学研究科の森浩一教授、東北大学流体科学研究所の早川晃弘准教授らは、独自に開発した「複数放物面レーザー推進機」の打ち上げ実験を行い、繰り返しパルスレーザーの照射により、機体全長約15 mmの約7倍の高度110 mmまで自由飛行させることに成功しました。さらに、安定飛行の実現のため、ロケットの動きをリアルタイムで検知してレーザー照射位置を追従させる「レーザートラッキングシステム」を開発し、継続的な推力付与を実現できることを世界で初めて示しました。これらの成果は、レーザー推進システムによるロケット打ち上げの実現に向けた大きな一歩です。
本研究成果は、2025年5月3日付けの科学誌Scientific Reportsに掲載されました。
研究の背景
現在、宇宙にアクセスする手段は化学燃料を用いたロケットが主流ですが、この方式では大量の燃料が必要なため、打ち上げコストが非常に高額になります。その結果、ごく限られた人々しか宇宙に到達できないのが現状です。この課題を解決する方法のひとつが「レーザー推進」です。これは、地上基地からレーザーを照射して、燃料を使わずにロケットを飛ばす方式です。ロケットには放物面ミラー(光を一点に集める曲面鏡)が取り付けられており、これによりレーザー光が集光されると、その集光点付近の空気が電離してプラズマ(注2)(気体が電気を帯びた状態)に変化します。このプラズマは、さらにレーザーのエネルギーを吸収して加熱され、その熱が周囲の空気へと急速に伝わることで、衝撃波と呼ばれる高圧の波が発生し、この衝撃波がロケットの本体を押すことで、推進力となります。この仕組みは、ロケットに搭載する燃料を削減し、打ち上げコストの大幅な低減へと繋がります。具体的な試算によると、低コストロケットの繰り返し打ち上げにより初期のレーザー発振基地建設費用を償還し、従来ロケットと比較して1/4以下の打ち上げ費用となります[1]。レーザー推進による打ち上げ技術が確立されれば、宇宙旅行が一般化し、より多くの人々が宇宙へアクセスできる未来が訪れるかもしれません。
さて、このように夢のあるレーザー推進ロケットですが、実用化にあたっては問題点がいくつかあります。そのうちの一つが、ロケットがレーザー軸上から外れやすく、安定した飛行が維持できないという問題です。これは、レーザー軸上でロケットを支え続ける必要があるため、あたかも指の上でホウキを垂直に保ち続けるような困難さに例えられます。この課題を克服するために、機体の姿勢を制御し、長時間の安定飛行(ビームライディング飛行)を維持する技術が求められています。
今回の取り組み
姿勢制御技術には、機体がレーザー軸から外れた際に自然と中心に戻る「受動的制御」と、ロケットの動きとレーザー軸からのずれを検知して、ロケットに追従してレーザー照射位置を動かす「能動的制御」があります。研究グループは、これまでに数値シミュレーションを主として両者の研究を行ってきました[2–4]が、今回は、東北大学大学院工学研究科の高橋聖幸准教授、速館佑弥大学院生(研究当時)、大阪公立大学大学院工学研究科の森浩一教授、東北大学流体科学研究所の早川晃弘准教授とで行った、受動的制御性能検証のための打ち上げ実験と、能動的制御システムの開発および実証実験について発表します。
まず受動的制御に関しては、機体デザインに工夫を凝らしました。機体のメインボディにスパイクノズル形状のミラー(注3)を取り付け、機体に照射されたレーザーを、メインボディ周りに円環状に集光できる設計としました。また、円環状の集光領域を覆うようにリング状の部品(カウル)を取り付けました。この構造により、機体が飛行中にレーザーの照射軸から横にずれた場合、レーザーがカウルの内側に不均一に集光されるようになります。すると、レーザーによる加熱で生成される衝撃波に不均一が生じ、衝撃波がカウルを押す力にも偏りが発生します。この非対称な力の働きによって、機体は自然に元の中心軸(レーザー軸)へと引き戻される方向に動き、積極的な制御をしなくても姿勢が自動的に補正されるようになります。加えて、機体軸上には放物面ミラーを取り付け、機体軸がレーザーの照射軸から傾いた際には、放物面ミラー内でのレーザー集光位置が変化し、それに伴って発生する衝撃波の形が変わることで、角度のずれを打ち消せる設計としました。この機体はスパイクノズル形状のミラーと放物面ミラーとを組み合わせた形状をしているため、本研究グループでは「複数放物面レーザー推進機」と呼んでいます(図1)。
この機体の受動的制御能力を検証すべく、ロケットに向けて鉛直上向きに繰り返しパルスレーザーを照射し、実験室において自由飛行の打ち上げ実験を行いました。1ショットあたり約5 Jのレーザーを50 Hzで繰り返し照射した結果、重量約2 gの機体が機体全長約15 mmの7倍程度の高度110 mmまで浮き上がり、自由飛行することに成功しました(図2)。この際、レーザーの照射軸に自然と引き寄せられるように機体が運動したことが確認でき、受動的制御の実験的実証にも成功しました。開発機体はUFOのような見た目をしているため、飛行の様子はまるでUFOがふわりと浮かび上がる瞬間を見ているかのようでした。
しかしながら打ち上げ実験を通し、受動的制御だけでは数分から数十分間にわたる安定飛行の確実性に欠くことが示唆されたため、能動的制御を担う仕組みとして、ロケットの動きをリアルタイムで追尾しながらレーザーを照射する「レーザートラッキングシステム」の開発にも取り組みました。システムの定量的な追尾性能を評価するため、レーザーで自由飛行させる代わりに、推進機を自作のロボットアームに取り付け、自由飛行時と同程度の速度で機体を動かす実験を行いました(図3)。ステレオカメラを用いて、空間内の機体の位置と速度をリアルタイムで取得しました。取得した情報は、モーター、ベルト式アクチュエータ、ミラーから構成されるレーザー走査システムに送られ、機体の動きに合わせてレーザー照射位置を制御します。その結果、自由飛行時に想定される機体移動速度程度であれば、レーザーを十分に正確に追尾させることができ、衝撃波と推力を継続的に発生させられることが世界で初めて実証されました(図4)。
今後の展開
本研究では、「複数放物面レーザー推進機」の打ち上げ実証と、リアルタイム追尾を可能とする「レーザートラッキングシステム」の開発・実証に成功しました。これにより、レーザー推進によるロケット打ち上げの実現に一歩前進したと言えます。今回の取り組みでは最長約0.26 秒のフライトでしたが、今後は、レーザートラッキングシステムを用いた打ち上げ試験を行い、打ち上げの全工程を通じて、安定的なビームライディング飛行が達成できるかを検証する予定です。そして最終的には、より高出力の繰り返しパルスレーザーを用い、高度100 km以上の宇宙空間到達を目指します。また、本技術は、ロケットのみならず、飛行機への応用も可能と考えています。将来的には、従来のドローンやジェット機のようにプロペラやジェットエンジンを用いるのではなく、レーザー推進のみで飛行可能な航空機の実現も視野に入っています。
謝辞
本研究はJSPS科研費JP24K07879の助成を受けて実施されました。また、本論文は「東北大学2025年度オープンアクセス推進のためのAPC支援事業」の支援を受けました。
用語説明
(注1)繰り返しパルスレーザー
非常に短い時間だけ発光する高出力レーザー光を、毎秒数十回以上の頻度で繰り返し照射するもの。1回あたりのレーザーエネルギーを集中させて高温・高圧の状態を得るのに適している。
(注2)プラズマ
気体に高エネルギーが付与され、分子や原子が電離し、イオンと電子に分かれた状態。電磁場に反応しやすく、レーザー推進などのエネルギー伝達過程で重要な役割を果たす。
(注3)スパイクノズル形状のミラー
先端が細長く突き出た「スパイクノズル」形状を持つ反射鏡。レーザー光を円環状に効率よく集光できるように設計されている。
参考文献
- [1] H. Katsurayama, K. Komurasaki, and Y. Arakawa, “A preliminary study of pulse-laser powered orbital launcher,” Acta Astronautica, Vol. 65, pp. 1032–1041 (2009).
- [2] M. Takahashi and N. Ohnishi, “Beam riding performance of asymmetrically propelled laser vehicle,” AIAA Journal, Vol. 50, pp. 2600–2608 (2011).
- [3] M. Takahashi and N. Ohnishi, “Beam-riding flight of a laser propulsion vehicle using actively controlled pulse,” Journal of Propulsion and Power, Vol. 32, pp. 237–250 (2016).
- [4] M. Takahashi and N. Ohnishi, “Theoretical and numerical studies of dynamic scaling of a six-degree-of-freedom laser propulsion vehicle,” International Journal of Aerospace Engineering, Vol. 2015, 801371 (2015).
論文情報
著者: Masayuki Takahashi*, Yuya Hayadate, Koichi Mori, and Akihiro Hayakawa
*責任著者: 東北大学大学院工学研究科 航空宇宙工学専攻 准教授 高橋 聖幸
掲載誌: Scientific Reports, Vol. 15, 15513 (2025).
DOI: 10.1038/s41598-025-00429-0
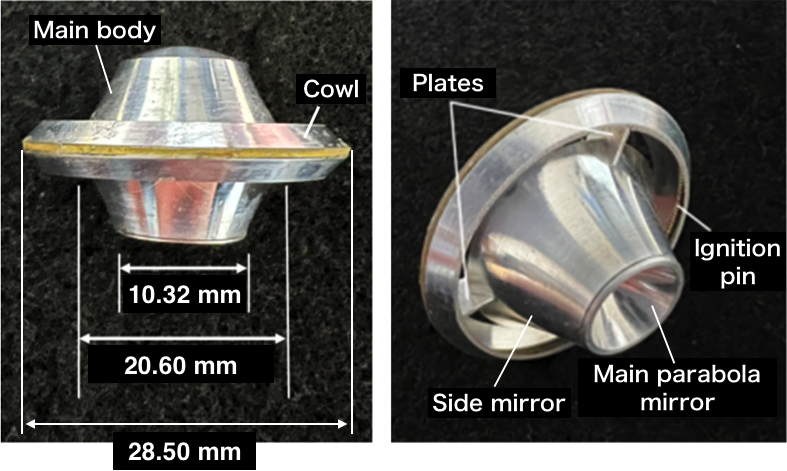
図1. 開発した複数放物面レーザー推進機。機体全長は約15 mm。
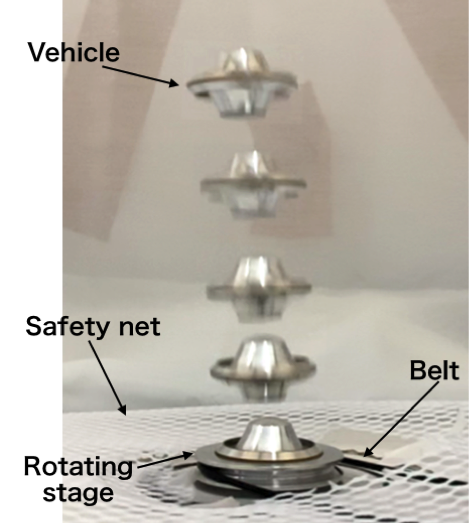
図2. 打ち上げ実験の様子。
関連動画
Free flight of a multi-parabola laser propulsion vehicle
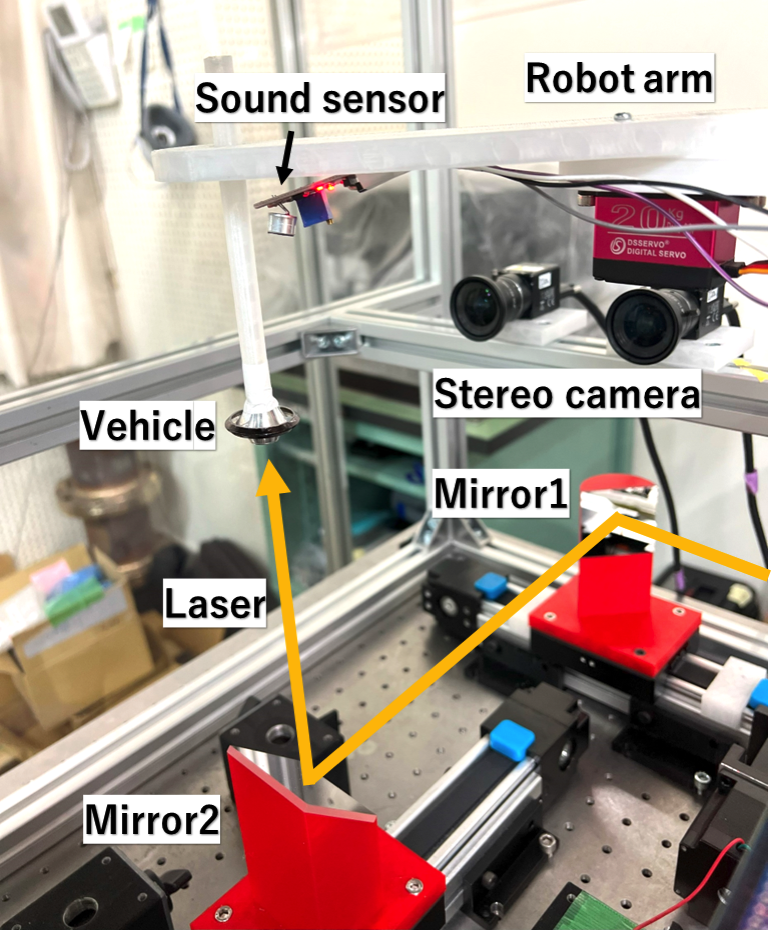
図3. 開発したレーザートラッキングシステム。

図4. 機体の移動速度およびレーザートラッキングの成否。機体はロボットアームに取り付けて移動させ、運動に追尾させて10 Hzの繰り返し周波数を持つパルスレーザーを照射しました。Speed は機体の移動速度を表します。Voltageは機体に取り付けた音センサーのシグナルを表し、レーザー照射および衝撃波の駆動に成功した際には0.4 V以上の電圧を示します。
お問合せ先
東北大学大学院工学研究科航空宇宙工学専攻 准教授 高橋 聖幸
TEL:022-795-3864
E-mail:masayuki.takahashi.c8@tohoku.ac.jp
