電気で動く「やわらかい糸」を開発
- 身体に寄り添う次世代アクチュエータファイバ -
2026/01/21
発表のポイント
概要
柔らかく安全に動作するアクチュエータは、ソフトロボティクスやウェアラブルデバイスなど、次世代の人間共存型技術において重要な役割を担っています。しかし、従来のアクチュエータの多くは金属材料を用いており、高い剛性や動作自由度の制限、複雑な駆動系が課題となっていました。
東北大学学際科学フロンティア研究所・大学院医工学研究科の郭媛元准教授、ならびに工学部 機械知能・航空工学科の秋元有斗学部生(学際科学フロンティア研究所ジュニアリサーチャー)を中心とし、フランスINSA Lyon MatéIS研究所、および日仏ジョイントラボラトリー(ELyTMaX)との国際共同研究チームは、光ファイバ製造に用いられる熱延伸技術を応用することで、電圧をかけるだけで曲がり・収縮・三次元的に動作するポリマー製の超細径ソフトファイバアクチュエータの開発に成功しました。本デバイスは、髪の毛ほどの細さでありながら高い柔軟性と多自由度の動作を実現しており、身体に寄り添うソフトロボットやウェアラブル機器などへの応用が期待されます。
本研究成果は、学術誌ACS Omegaに2026年1月20日付で掲載されました。
研究の背景
アクチュエータは、ロボットや機械が動くための中核技術です。近年ではソフトロボットやウェアラブル機器、医療・ヘルスケア分野において、より柔らかく安全に動作するアクチュエータへの関心が高まっています。特に、人の身体と直接接触する用途では、高い柔軟性や機械的適合性が不可欠です。しかし、従来のアクチュエータの多くは形状記憶合金などの金属材料を用いており、材料の硬さによる安全性の制約や、動きの自由度に制限があること、加熱や磁場を作用させたりすることによる複雑な駆動方式が課題となっていました。
一方、光ファイバ製造を起源とする熱延伸技術は、電圧をかけるための部品(電極)や、液体・空気の通り道(流路)、センサなどを一本の細いファイバ内に集積できる製造手法として発展してきました。近年、この技術を用いた「動くファイバ」の研究も進められてきましたが、形状記憶合金や磁性材料などの硬い材料に依存する例が多く、柔軟性や動作の自由度という点で依然として課題が残っていました。
今回の取り組み
本研究では、こうした課題を克服するため、誘電エラストマー(注4)に基づくポリマー製ソフトアクチュエータを、熱延伸技術によってファイバ形状で実現しました(図1)。誘電エラストマーとしての電気応答性を保ちつつ高い柔軟性を有する熱可塑性ポリウレタン(PU)材料に着目し、熱延伸に適した加工条件を見いだしました。これにより髪の毛ほどの細さでありながら、電圧をかけるだけで曲がり、縮み、さらには三次元的にうねるような多自由度動作が可能なソフトファイバアクチュエータの開発に成功しました(図2)。
開発したファイバは、一般的なプラスチックよりもはるかに柔らかく、ゴムに近いしなやかさを備えています。そのため、電圧をかけることで無理なく曲がったり縮んだりする動きを安定して生み出すことができます。
また、ファイバ形状であることから、巻く・編む・織り込むといった簡単な加工により、らせん状や布状などの三次元構造へと自在に組み込むことができ、従来の平面型アクチュエータでは困難であった立体的かつ柔軟な動作を実現しました(動画)。
今後の展開
本研究で開発したソフトファイバアクチュエータは、柔軟性・安全性・多自由度動作を兼ね備えた新しいアクチュエータ基盤技術として、ソフトロボットやウェアラブル機器をはじめとする次世代デバイスへの応用が期待されます。今後は、電極材料や構造設計の最適化によるさらなる動作性能の向上や、センサや流路など他機能との統合を進めることで、「感じて動く」多機能ファイバデバイスへの発展を目指します。本技術は、身体に寄り添い、人と共存するやさしいロボット工学の実現に向けた重要なステップとなるものです。
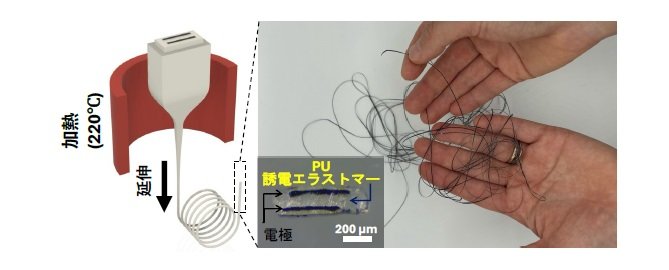
図1. 延伸技術により電気で動く「やわらかい糸(ソフトファイバアクチュエータ)」を実現した。
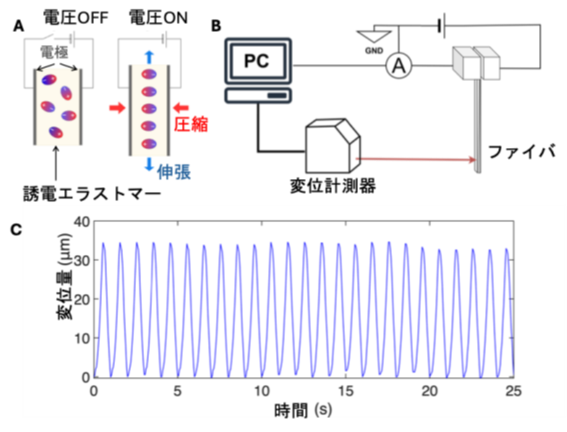
図2. 電気で動く「やわらかい糸(ソフトファイバアクチュエータ)」の動作原理と変位応答の例を示す。
A. 誘電エラストマー内部では、電圧を印加すると電極間に力が生じ、厚み方向に圧縮されると同時に、長さ方向に伸張することで変形が起こる。
B. ファイバ状アクチュエータの測定構成の模式図。
C. 流電圧を印加した際のファイバ先端の変位応答。電圧に同期して、安定した周期的変位が得られていることを示している。
動画
糸のように巻くだけでらせんのような立体構造となり、回転する動きが生まれる
謝辞
本研究は国立研究開発法人科学技術振興機構(JST)FOREST(JPMJFR205D)および公益財団法人三菱財団 自然科学研究助成の支援を受けて実施されました。
用語説明
(注1)熱延伸技術
材料を加熱して柔らかくした状態で引き伸ばすことで、センチメートルサイズの材料を、設計した断面構造を保ったまま、マイクロメートルからナノメートルサイズまで細く加工できる製造技術。もともとは光ファイバ製造に用いられてきたが、近年では電極やセンサ、流路など複数の機能を一本の柔軟なファイバ内に集積できる技術として発展してきた。
(注2)ソフトアクチュエータ
ゴムや柔らかい高分子材料などを用いて作られた、「しなやかに動く駆動装置」のことである。電気や空気、熱などの刺激によって、曲がる・伸びる・縮むといった動作を行い、金属製のモーターやアクチュエータに比べて柔軟性が高く、安全に人や生体と接することができる。そのため、ソフトロボット、ウェアラブル機器、医療・ヘルスケア分野など、人の身体に寄り添う技術への応用が期待されている。
(注3)ソフトロボット
従来の金属や硬い部品を中心としたロボットとは異なり、ゴムや樹脂などの柔らかい材料を用いて、人や環境に安全になじむよう設計されたロボットを指す。
(注4)誘電エラストマー
電圧を印加すると、ゴムのようにやわらかく伸びたり縮んだりする材料のこと。電圧をかけることで材料そのものが動くため、モーターを使わずに動きを生み出すことができる。この性質から、人の筋肉のようにしなやかに動く「人工筋肉」として注目されている。柔らかく静かに動くのが大きな特長である。
論文情報
著者: Yuto Akimoto, Gildas Coativy,Jean-Yves Cavaillé, Jérôme Adrien, Eric Maire, Yuanyuan Guo*
*責任著者: 東北大学学際科学フロンティア研究所 新領域創成研究部/東北大学大学院医工学研究科 バイオファイバ医工学分野 准教授 郭媛元
掲載誌: ACS Omega
DOI: 10.1021/acsomega.5c09586
お問合せ先
東北大学学際科学フロンティア研究所 新領域創成研究部/東北大学大学院医工学研究科 バイオファイバ医工学分野 准教授 郭媛元
TEL:022-795-5768
Email:yyuanguo@fris.tohoku.ac.jp
