分子機械を組み合わせ「アメーバ型分子ロボット」を開発 - 信号分子を認識し変形機構を制御する世界初の人工分子システム -
2017/03/02
・分子機械を統合制御する分子ロボットを開発しました。
・このロボットは,DNA分子を認識してタンパク質分子モータの力伝達をON/OFFすることで,アメーバのように変形する活動状態と静止状態とが切り替えられます。
・微小な環境ではたらく自動制御分子システムの開発に寄与するものと期待されます。
東北大学大学院生・佐藤佑介,東北大学准教授・野村 M. 慎一郎らの研究グループはDNAやタンパク質などの生体分子からなる「分子機械」を人工細胞膜内に統合し,変形機構を制御する「アメーバ型分子ロボット」を開発しました。手の届かない微小世界に人間の意思を届けるための基礎研究です。
近年,化学や合成生物学の分野において,生体分子を材料として用い,センサ(感覚装置)やプロセッサ(計算機)・アクチュエータ(駆動装置)と呼ばれるさまざまな分子機械をつくる要素技術が確立しつつあります。分子ロボットとは,これら分子機械を統合し,協調して人間の命令どおりに動作させる制御システムです。体内などの極小かつ複雑な環境下で精密に命令通りに働くことのできるロボットの実現は,人間の可能性を大きく引き上げる技術として期待されています。
今回開発されたアメーバ型分子ロボットは,信号を認識してアクチュエータを制御するというロボットシステムを,分子機械の統合によって実現した世界初の成果です。本成果をプラットフォームとして,今後さまざまな機能を持つ分子ロボットの開発が進むことが期待できます。将来的には,細胞レベルでの診断・治療や環境汚染のモニタリングなどへの応用が期待できます。
これらの研究成果は2017年3月1日に,アメリカ科学技術振興協会(AAAS)刊行の科学雑誌「Science Robotics」に掲載されます。
われわれ生命体は,ミクロな目で見るとDNAやタンパク質などの生体分子を利用して液体の中の微小な環境を制御しています。たとえば白血球は,バクテリアが放出する分子を認識し,変形をくりかえしつつ細菌を追いかけ退治する,という行動を日常的に行っています。これはマクロなロボットになし得ない驚異的な機能と言えるでしょう。
1981年,アメリカの工学者Eric Drexlerは,生体分子を材料として利用し,微小な機械を構築できる可能性について述べました。そして現在,化学や合成生物学の進歩によって,生体分子を材料にして,センサやプロセッサ,アクチュエータといった分子機械を作ることができるようになりつつあります。たとえばDNA分子では4種の塩基配列を設計することで連鎖反応やナノ構造をつくることができ,センサや計算機の材料として研究が進んでいます。また生体を運動させたり物質を運んだりするモータータンパク質*は,実際に力を発生する分子アクチュエータとしての利用が研究されています。
今回の研究グループらが所属する日本の分子ロボティクス研究会**では,これらの分子機械を一連のシステムとして統合する「分子ロボット」という概念を,世界に先駆けて提唱し,その実現を目指しています。すべての要素が分子レベルで組み上げられる分子ロボットは,ロボットの最小かつ究極の姿とも呼べるでしょう。大きな課題は,分子機械をいかに統合すれば人間がコントロールできるような分子ロボットが組み上げられるのか,という基本的な方法論を確立することにあります。多彩な分子機械が人間の設計通りに統合され動作する分子ロボットには様々な応用が期待できます。例えば細胞レベルでの診断・治療や環境汚染のモニタリングなど,人類にとって重要な課題をミクロの世界から解決しうる技術開発の新たな道筋が開けることでしょう。
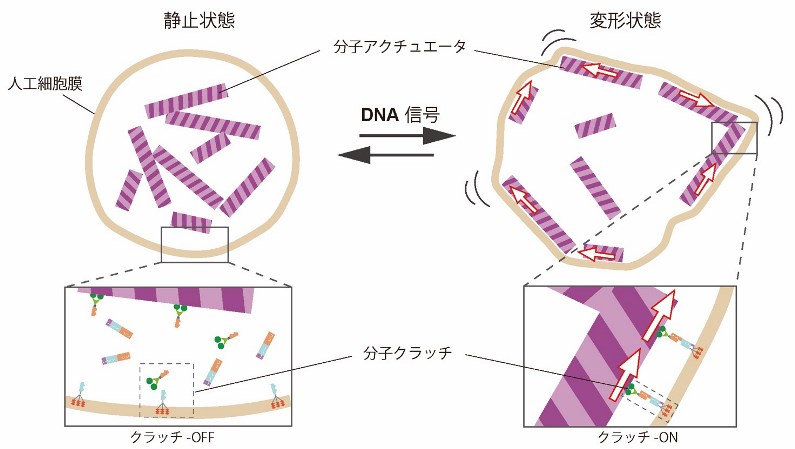
今回,研究グループは信号分子に応じて変形機能を制御する「アメーバ型分子ロボット」を開発しました(図1)。ロボットの大きさは数十マイクロメートル(100万分の1メートル)と人間の細胞と同程度です。この分子ロボットは,人工細胞膜の内部に統合されたタンパク質(キネシンと微小管)で構成される「分子アクチュエータ」と,DNAで作製した「分子クラッチ」で構成されています。分子クラッチが分子アクチュエータからの力の伝達を切り替えることで,ロボットの変形は制御されます(図1下部)。
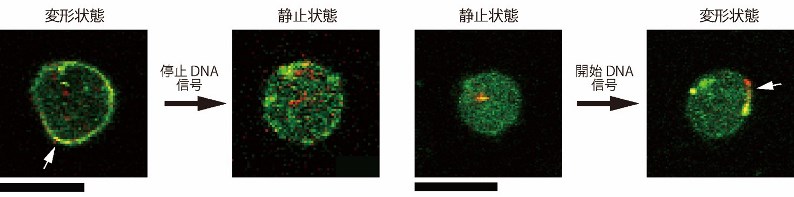
研究グループは,このアメーバ型分子ロボットが信号DNAの入力にしたがって変形を開始したり停止したりすることが設計通りに可能であることを実験により証明しました(図2).ロボットの内部には光応答性のDNA信号が組み込まれており,光の照射をきっかけに命令がロボット内部に入力され,変形の開始・停止がコントロールされました。
今回開発された分子ロボットは,動く/止まるを切り替えられる機能に限定されたいわばプロトタイプの段階ですが,研究グループはこのロボットが冷凍輸送でき,受け取った他の研究室で解凍して再起動できることも示しています。本機をプラットフォームとしてさまざまな分子機械を組み込むことで,より高度な機能を持った分子ロボットの開発が加速されてゆくものと期待できます。
この研究は日本学術振興会・科研費,新学術領域「分子ロボティクス」,日本医療研究開発機構(AMED-CREST),東北大学学際高等研究教育院等を通して助成されたものです。
「マイクロメートルサイズの分子ロボットが信号分子に応じて変形する」
著者: Yusuke Sato1,2, Yuichi Hiratsuka3, Ibuki Kawamata1, Satoshi Murata1, Shin-ichiro M. Nomura1
所属: 1東北大学大学院 工学研究科,2日本学術振興会 特別研究員,3北陸先端科学技術大学院大学
掲載誌: Science Robotics
DOI番号: 10.1126/scirobotics.aal3735
*モータータンパク質:
筋肉や細胞内で分子運動をつかさどるタンパク質で,エネルギーを消費してスライド運動や回転運動をする。代表的なものにキネシン,ダイニン,ミオシン,F1Fo等がある。
**分子ロボティクス:
化学・分子工学・合成生物学により創製される分子デバイス群に,ロボット工学の方法論を導入してこれらをシステム化し,従来の方法論では達成しえない「プログラム可能な人工分子システム」の実現をねらう学問領域。
参考:新学術領域「分子ロボティクス」ウェブページ
フリードリッヒ・シーメル博士(独ミュンヘン工科大学教授,専門:合成生物学)
「野村らの論文は,自律的なソフトマイクロロボットの開発に向けて大きな一歩を踏み出したものです。人工的な細胞骨格を含み、光によって活性制御が可能な分子モータの助けを借りて動く,という細胞模倣型マイクロロボットの最初の実証的研究です。ロボット膜への分子モータの局在の制御を,可逆的なDNAリンカー分子で行っており,光応答性のDNA分子がトリガーとしてはたらくことで,運動が切り替わります。この成果をもとにして,将来,人工的な走光性(光に向かう運動)や走化性(化学物質に向かう運動)など「知的な」行動をする分子システムが開発されることでしょう。」
ショーン・ダグラス博士(米国UCSF准教授,専門:ナノテクノロジー)
「生物,をエンジニアの視点から見ると,感知した入力に対して様々な物理的行動によって応答できる,複雑な分子構成要素からなるシステムです。われわれエンジニアは,そのシステムについて生物学者たちから「リバースエンジニアリング」することで貴重な知見を得ています。その一方,(今回の)佐藤らの研究は「フォワードエンジニアリング」に取り組んでおり,生物から得られた知識を検証し,最終的に有用な技術という形として結実させるために重要です。」
東北大学大学院工学研究科 野村 M.慎一郎 准教授
電話:022-795-6910
E-mail:nomura◎molbot.mech.tohoku.ac.jp (◎を@に置き換えてください)
