少ないデータと2個のセンサで脳卒中患者の運動を予測する技術を開発
- 物理法則を組み込んだ機械学習と時間的畳み込みネットワークを融合 -
2025/07/02
研究室ウェブページ
発表のポイント
- 脳卒中(注1)患者に見られる左右非対称な歩行パターンに対し、少ないデータとセンサで歩行運動を予測する新たな方法を開発しました。
- 慢性脳卒中患者17名と健常者6名での検証により、開発したフレームワークの有効性を実証しました。
- 本手法は物理法則に基づく推定とデータに基づく推定の両方を組み込んでおり、特に計測データ量が少ない状況下において、予測精度の向上に寄与することが明らかになりました。
概要
脳卒中患者は、片側性の運動障害により非対称な歩行パターンを示し、下肢関節の運動様式の個人差が大きいことが知られています。理学療法士などのセラピスト(注2)は、下肢運動の機能を評価し、リハビリテーション方針を決定しますが、正確な測定を行うには、4つ以上のセンサ(慣性計測装置:IMU(注3))が必要となることが一般的でした。
東北大学大学院工学研究科の林部充宏教授、大脇大准教授、Yan Guo大学院生(研究当時)、東北大学病院診療技術部リハビリテーション部門の関口雄介主任理学療法士(現同大学大学院歯学研究科)、同大学大学院医学系研究科の海老原覚教授らの研究グループは、時間的畳み込みネットワーク(注4)と物理法則を組み込んだ機械学習(Physics-Informed Learning)(注5)を組み合わせることで、歩行中の下肢運動を予測する新たな手法を開発しました。本手法では、使用するIMUを従来の4つ以上から、わずか2つにまで減らすことに成功しました。慢性脳卒中患者17名と健常者6名による検証を通じて、本フレームワークの有効性が確認されました。
本研究成果は、米国電気電子学会が発行する神経工学の専門誌IEEE Transactions on Neural Systems and Rehabilitation Engineeringに2025年6月19日付けで掲載されました。
研究の背景
脳卒中は脳組織に損傷を与える疾患で、主に身体の片側に運動麻痺を引き起こします。日本では認知症に続いて介護が必要となる原因の第2位を占めており、発症によって自立した生活が困難になる例も少なくありません。脳卒中患者は、左右非対称な歩行パターンを示し、下肢関節の運動様式は個人差が大きいことが知られています。従来法として、光学式3次元動作解析装置(注6)などを用いる方法がありますが、多数のマーカーの設置や専用の計測環境が必要となり、準備・実施の負担が大きいという課題があります。
この代替手段として、加速度や角速度を測定できる慣性計測装置(IMU)が注目されています。IMUはウエアラブルかつ取り扱いやすいため、日常生活環境での歩行評価にも適していますが、精度の高い予測には通常複数個の装着が必要とされ、依然として簡便な運動評価には課題が残っています。
今回の取り組み
本研究では、時間的畳み込みネットワークと人体の運動に関する物理法則を組み込んだ機械学習を組み合わせることで、IMUの使用をわずか2つに抑えながらも、高精度な下肢運動予測を可能とする新たなフレームワークを開発しました。この手法では、2つのIMUから得られる測定値に加え、生体運動歩行モデルに基づいて導出された物理的制約を複合損失関数に組み込み、学習ネットワークの性能向上を図っています。
本手法の有効性を評価するため、17名の慢性期脳卒中患者と6名の健常者を対象にした検証を行いました。二乗平均平方根誤差(RMSE)およびピアソン相関係数(PCC)を用いて予測結果を評価し、4つ以上のIMUを使用した従来システムと同等の運動再構築精度が得られることが確認されました。
さらに本手法は、データを大量に必要とする従来の学習アプローチとは異なり、物理法則を取り入れることで、特に計測データ量が限られる状況下において、精度の向上に寄与することが明らかになりました。
今後の展開
今回得られた知見から、少数のセンサを用いた場合でも、脳卒中患者の麻痺側および非麻痺側の両方における歩行中の下肢運動予測が可能であることが示されました。また、健常者と慢性脳卒中患者の両方において高い推定精度が得られたことは、本フレームワークの有効性と汎化能力を示すものであり、少ないデータとセンサによる実用的なリハビリテーション支援への応用が期待されます。今後は、さらに多様な症例や日常生活環境における歩行評価への適用を進めることで、個別化された運動機能評価を簡便に実施できる新たな支援技術の確立が期待されます。
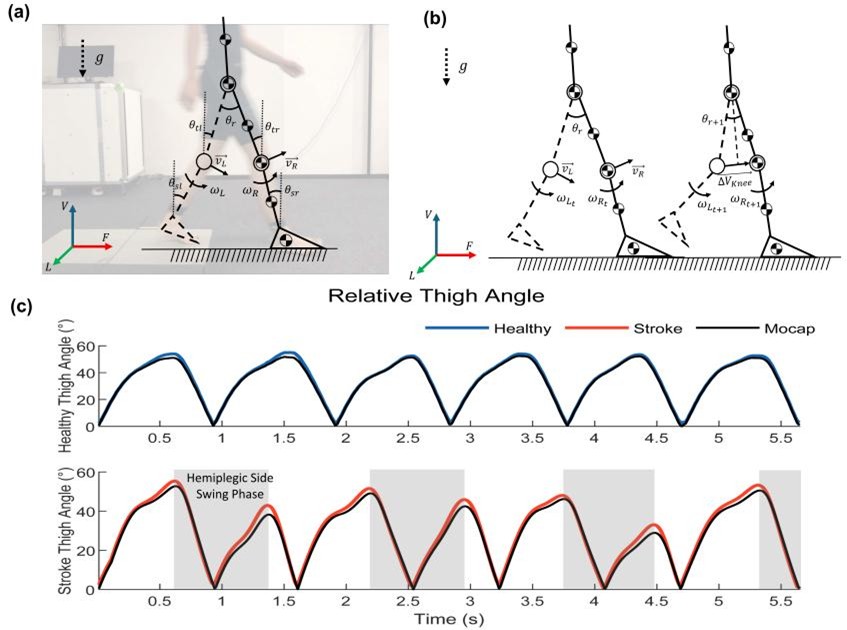
図1. (a) 矢状面における身体歩行の物理モデル (b) 下肢の物理法則に基づく運動予測の概念図 (c) 物理モデル出力と3次元動作測定による大腿部相対角度の比較(上:健常者、下:脳卒中患者)
謝辞
本研究は立石科学技術振興財団の助成およびJSPS 科研費 JP22K11443の助成により実施されました。本論文は『東北大学2025年度オープンアクセス推進のためのAPC支援事業』の支援を受けました。
用語説明
(注1)脳卒中
脳血管疾患の一種で、脳に向かって血液が流れている動脈が破裂、詰まるなどし、血液の流れが途絶されることにより脳の組織の一部が壊死し、運動麻痺などの症状が現れる疾患。
(注2)セラピスト
専門知識や技術を生かして心や身体を癒す職業。その中で心身に不調がある患者を対象に、治療をおこなうセラピストは主に理学療法士、作業療法士、言語聴覚士、柔道整復師、あん摩マッサージ指圧師、鍼灸師の6つで、いずれも国家資格が必要となる。
(注3)慣性測定装置(IMU)
加速度計、ジャイロスコープ、磁力計を組み合わせて物体の加速度、角速度、方位を測定し、位置や姿勢を推定する小型センサ装置。
(注4)時間的畳み込みネットワーク
時間的畳み込みネットワーク(Temporal Convolutional Network:TCN)は、時間方向の畳み込みを用いて時系列データを効率的に処理するアーキテクチャで、再帰型ニューラルネットワークより高速で長期依存関係の学習に優れる。
(注5)物理法則を組み込んだ機械学習(Physics-Informed Learning)
微分方程式などの物理法則を損失関数に組み込み、データと物理知識を統合して予測精度と解釈性を向上させる手法。
(注6)光学式3次元動作解析装置
複数の高速度カメラと身体に装着した反射マーカーを用いて、対象の動きを三次元的に計測する装置。臨床やスポーツ科学の分野で広く用いられているが、専用設備や計測準備を要する。
論文情報
著者: Y. Guo, Y. Sekiguchi, W. Zeng, S. Ebihara, D. Owaki, M. Hayashibe
*責任著者: 東北大学大学院工学研究科 教授 林部 充宏
掲載誌: IEEE Transactions on Neural Systems and Rehabilitation Engineering
DOI: 10.1109/TNSRE.2025.3581352
