脚を失った昆虫は歩行中の筋収縮リズムを変えて適応する!
〜 脚からの感覚フィードバックが脚間協調運動の鍵 〜
2021/01/15
発表のポイント
概要
昆虫は,外敵に襲われたり事故などで脚を失って身体の特性が変化したり,環境が変化したりすることに対して,柔軟に足並みを変化させることで歩行を続ける適応能力を有しています.この能力を解明することは,生物学に資するのみならず,昆虫のような高い適応能力を有するロボットの開発にも繋がります.
東北大学工学研究科 大脇大(おおわきだい)准教授,北海道大学電子科学研究所 青沼仁志(あおぬまひとし)准教授,大阪大学大学院工学研究科 杉本靖博(すぎもとやすひろ)准教授,東北大学電気通信研究所 石黒章夫(いしぐろあきお)教授らの研究グループは,コオロギを使って歩行中の脚の運動と筋活動を計測し,中脚の筋収縮のリズムが,脚の切断前後で,左右反対位相から左右同位相に変化することを明らかにしました.この結果は,(1) 左右同相同期の筋収縮リズムを生成する神経回路の存在,(2) 脚に存在する感覚器からの感覚フィードバックにより同相同期パターンが上書きされ,通常歩行時の左右反対位相のリズムが生成される,ことが示唆されます.
本研究成果は,2021年1月14日に英国の科学誌Scientific Reports電子版に掲載されました.
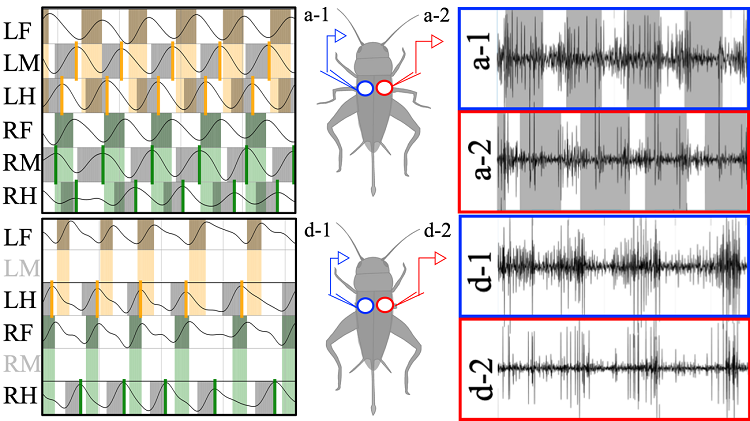
図1 脚切断前後の歩行と筋活動の変化.上:健常個体の歩行.下:左右の中脚切断時.左:歩行パターン.右:左右の中脚の筋活動.歩容は,トライポッドに近い歩容(LF-RM-LHとRF-LM-RHで交互に接地)から脚切断後にトロットに近い歩容(LF-RHとRF-LHが交互に接地)に変化.筋活動は,脚の運動(右図の色塗りが接地期間)と同様に左右反対位相で筋収縮していたのに対して,脚切断後は左右同位相の筋収縮リズムに変化.
研究背景
昆虫は,自切や事故などによって脚が切断されて自身の身体構造が劇的に変化しても,柔軟に歩行運動を生成する適応能力を有しています.このような能力の背後に潜むメカニズムを解明することができれば,昆虫に比肩する運動機能を有する「しぶとくレジリエントなロボット」の工学的な実現に資するため,重要な研究課題です.
このような昆虫の歩行生成を司る制御機構として,胸部神経節*6(thoracic ganglia)に存在するリズミックな信号を生成する経回路網(Central Pattern Generator)と感覚フィードバックに基づく反射*7メカニズムの存在が示唆されていますが,その詳細なメカニズムは,いまだ不明な部分が多く残っています.
研究方法
本研究では,適応的な歩行生成メカニズムを明らかにするため,歩脚の切断実験を採用しました.歩脚を切断することにより,脚に存在する感覚器からの感覚フィードバックの影響を除去することができ,歩行生成における感覚フィードバックの寄与を浮き彫りにすることが可能となります.特に,歩行における脚の運動を生成する筋肉の活動(筋電位)に着目しました.筋電位は,歩行の生成を司る神経系の活動を反映していると同時に,脚の切断前後においても感覚器や運動器への影響を最小限に抑えて計測することが可能な生体信号です.
具体的には,クロコオロギ(学名:Gryllus bimaculatus)をモデル生物として採用し,中脚切断前後の歩行中の脚運動と筋活動を計測しました.コオロギを球状トレッドミル(球状発泡スチロールを土台にのせ,エアポンプで加圧し浮上)の上で歩行させ,上面からのハイスピードカメラと筋電位計を用いて,脚運動と筋活動を計測しました.
成果とその意義
歩行パターン解析の結果,健常個体では通常の歩行時には,同側の前脚・後脚と反対側の中脚がほぼ同じタイミングで地面に接地するトライポッド(tripod)歩容と呼ばれる歩容を示す一方,中脚を脚の付け根(基節*8:coxatrochanteralより先端部)で切断すると,残存する前後脚の対角同士のペア(左前と右後,右前と左後)がほぼ同時に接地する,四足動物でみられるトロット(trot)歩容に変化することがわかりました(図1左).さらに,歩脚の切断前後でも計測が可能な中脚の付け根にある脚を動かす筋肉の筋活動を解析すると,中脚の切断前の通常歩行時は脚の運動と同様に左右反対位相のリズムで筋収縮していたのに対して,中脚の切断後には左右同位相での筋収縮リズムに変化することが明らかになりました(図1右).
この結果は,(1) 歩行生成を司る神経メカニズムとして,左右の中脚で同位相の筋収縮リズムを生成する回路が存在すること,(2) 左右同位相のパターンは脚からの感覚フィードバックによって上書きされ,健常個体の通常の歩行では中脚は左右が反対の位相パターンが生成されること,を示唆しています.昆虫の脚には,機械刺激*9を受容する感覚器が存在することが知られており,この感覚フィードバックが脚間の協調運動に大きな役割を果たしていることが示唆されました.本結果は,昆虫に匹敵する適応的歩行能力を有するロボットの制御方策の確立に寄与することが期待されます.
用語説明
*1 筋活動
運動を生成する際の筋肉の活動.筋肉が収縮する際の筋繊維の活動電位(筋電図)を計測することによって測定できる.
*2 反対位相,同位相
本研究での位相とは,脚の運動のタイミング,筋活動のタイミングと同意.同じタイミングで筋が活動することを同位相.歩行1周期中の半周期タイミングがずれて活動する場合を反対位相(あるいは逆位相)という.
*3 感覚器
動物の身体に存在する器官で,外部環境や体内の様々な物理的あるいは化学的な信号を刺激として受容する器官.視覚,聴覚,味覚,嗅覚,触覚など.
*4 感覚フィードバック
感覚器からの入力信号に基づき,効果器(運動器)への出力を調整する仕組み.
*5 脚間協調運動
多脚動物における脚の間の協調運動.ヒト(二脚),四足哺乳類(四脚),昆虫(六脚)などの脚式移動動物は,それぞれの脚間の運動を協調させることで,状況に応じた歩行パターンを生成している.
*6 胸部神経節
昆虫の胸部に存在する中枢神経系.歩行や飛翔などの運動パターンの生成を司る.昆虫を胸部だけの状態にしても,刺激入力に対してパターンを生成することが知られている.
*7 反射
動物の生理反応のうち,特定の刺激に対する応答.
*8 基節
昆虫の脚構造において,最も基部(胸側)にある節.昆虫の脚は,付け根(基部)から,基節(coxa),転節(trochanter),腿節(femur),脛節(tibia) ,跗節(tarsus)の順の5節から構成される.
*9 機械刺激
感覚入力のうち,機械的な圧力や,ひずみ,ねじれなどを検知する感覚器から得られる感覚情報.
研究助成資金等
物質・デバイス領域共同研究拠点(基盤共同研究:課題番号20201042)
日本学術振興会 科学研究費補助金 基盤研究 (B) JP16H04381研究代表者:大脇大
日本学術振興会 科学研究費補助金 国際共同研究加速基金 (国際共同研究強化) JP17KK0109, 研究代表者:大脇大
科学技術振興機構 CREST, JP-MJCR14D5, 主たる共同研究者:青沼仁志,石黒章夫
論文情報
著者: Dai Owaki, Hitoshi Aonuma, Yasuhiro Sugimoto, and Akio Ishiguro
雑誌名: Scientific Reports, 2021年1月14日
DOI: 10.1038/s41598-020-79319-6
