身体に宿る“知能”を活かすミズクラゲサイボーグ
- 小さなAIモデルによる泳ぎの予測に成功! -
2025/05/23
研究者ウェブページ
発表のポイント
概要
過酷な災害現場などでの調査への活用を目指した、生物の運動能力と電子制御を組み合わせた「生物サイボーグ」の研究が注目されています。
東北大学大学院工学研究科の大脇大准教授、山形県鶴岡市立加茂水族館の池田周平飼育課係長、奥泉和也館長、東京大学大学院情報理工学系研究科のAUSTIN MAX PHILIP(オースティン マックス フィリップ)特任助教、中嶋浩平准教授の研究グループは、ミズクラゲの筋肉に電気刺激を与えることで泳ぎを誘導し、その動きをシンプルな人工知能(AI)で予測する技術の開発に成功しました。そこに独自の3次元運動計測装置と筋肉電気刺激装置を組み合わせることで、自発的な遊泳リズムの特徴を明らかにし、予測可能な遊泳を生み出す最適な電気刺激入力を特定しました。将来的に海洋調査や環境保全のための自律型サイボーグロボットの開発につながる技術です。
本研究成果は、2025年5月23日18:00に科学誌Nature Communicationsに掲載されました。
研究の背景
生物と機械を融合させる「サイボーグ技術」は、近年、次世代のロボット開発に向けた革新的アプローチとして注目されています。特に、生物が持つ優れた運動性能や環境適応力を人工システムに取り入れることで、従来のロボットでは実現が難しかった複雑なタスクや予測困難な環境への適応が可能になると期待されています。ただしその実現には、生物の神経・筋肉・感覚器官と連動する電子制御系の構築が不可欠です。このアプローチは、動物が進化の過程で培った身体と自然環境との相互作用によって生まれる「身体性知能(注7)」を活用し、人工的なシステムへの応用を目指すものです。
中でも注目されているのが、水中での効率的な運動性能を持つミズクラゲです。クラゲは一見単純な体の構造をしていますが、実際には非常に効率的で柔軟な遊泳運動を実現しています。その遊泳は、傘状の身体をリズミカルに動かすことによって推進力を生み出す仕組みで、意図的に進行方向を変える能力や自己修復機能まで備えています。このようなクラゲを模倣したソフトロボット(注8)の開発が進む一方で、実際のクラゲに電子制御を融合した「クラゲサイボーグ」の研究(Xu et al. Sci. Adv. 2020)も始まっています。
しかし、現状のクラゲサイボーグ技術では、単純な速度制御は可能であっても、複雑な旋回行動の誘導や動きの予測には至っていません。クラゲの動きは、流体との複雑な相互作用によって生じるうえ、自発的な神経活動と外部刺激との関係性を理解する必要があるからです。また、クラゲの身体は小型かつ柔軟なため、大型の計算装置を搭載させると本来の運動効率が著しく損なわれるという課題もあります。
今回の取り組み
本研究では、クラゲが本来持つ自然な「身体性知能」を活用した新たなサイボーグ技術の開発に取り組みました。具体的には、クラゲの柔らかい身体と水中環境との相互作用を活かし、効率的かつ柔軟な運動を予測・制御するシステムを構築しました(図1)。クラゲの環状筋に電極を挿入し、パルス幅変調(Pulse Width Modulation: PWM)信号(注9)を用いて生体の神経信号を模倣した電気刺激を与えることで、クラゲの筋肉収縮を誘発しました。これにより、クラゲが持つ脈動的な身体運動を効果的に誘導し、自然に近い浮遊行動の再現に成功しました。
さらに、クラゲの運動を精密に測定・予測するための3次元モーションキャプチャシステム(注10)を独自に開発しました(図2)。紫外線を反射する特殊なマーカーをクラゲ体内に埋め込み、上方および鏡を用いた3方向からの映像を記録します。映像データは深層学習アルゴリズムDeepLabCut(注11)により解析され、3次元的な動きとして再構成されます。この手法により、クラゲの身体変形、移動速度、詳細な浮遊軌跡などの運動データを精密に取得できるようになりました。
本発表における最大の成果は、筋肉への電気刺激によるサイボーグ技術と計測システムを融合させ、取得した実験データの解析によって、適切な筋肉刺激条件を特定し、クラゲが持つ自発的かつ自己組織化(注12)された身体性知能を効果的に引き出すことに成功した点にあります。この成果に「物理リザバー計算(Physical Reservoir Computing: PRC)」と呼ばれる計算手法を応用し、クラゲの自然な運動をベースに、その動きを予測するハイブリッドな運動予測AIモデルを構築しました(図1)。
今後の展開
本研究では、クラゲ自身の身体運動を計算資源として活用する物理リザバー計算(PRC)という手法を導入しました。これは自然界の非線形動的システム(注13)が持つ多様な状態変化を利用し、比較的シンプルな回路でも効率的な予測や制御を可能にする手法です。本手法を通じて、クラゲの自発的な運動能力と電気刺激に対する応答を予測可能にし、最終的には探索的な自然運動と精密な制御運動を自由に切り替えられる高度なクラゲサイボーグの開発を目指しています。ワイヤレス刺激システムとの統合により、将来的には海洋環境モニタリングや環境汚染浄化活動などを支援するクラゲサイボーグの実用化への貢献が期待されます。
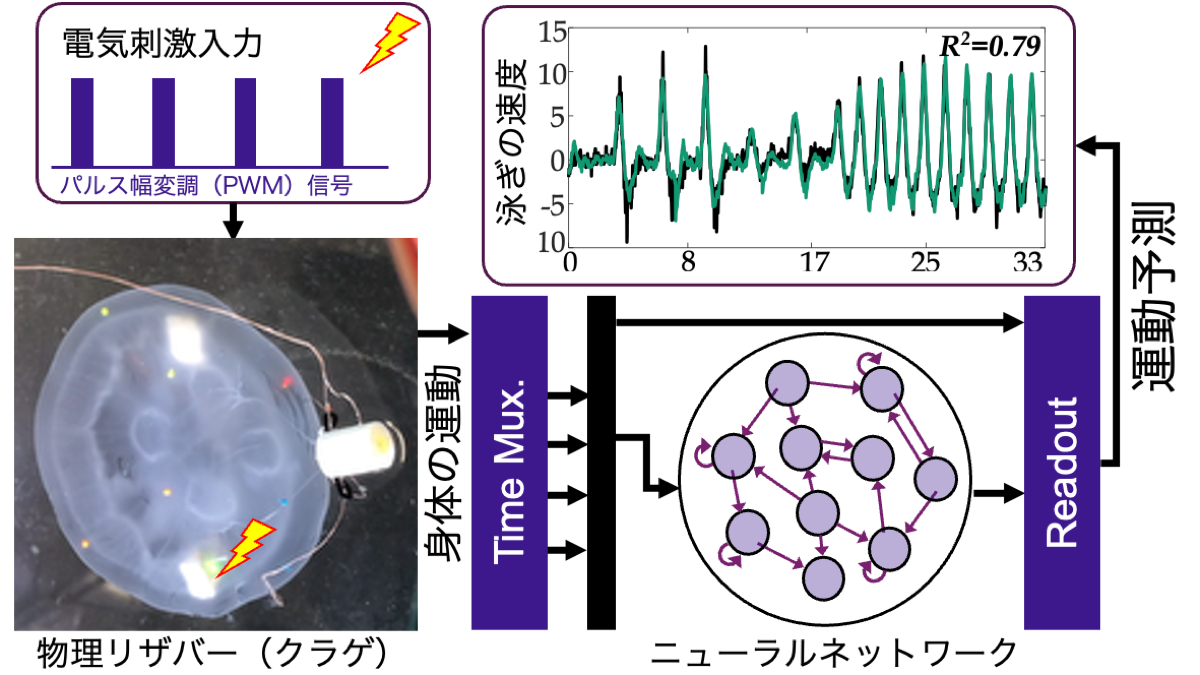
図1. ミズクラゲハイブリッドリザバー計算システムによる運動予測
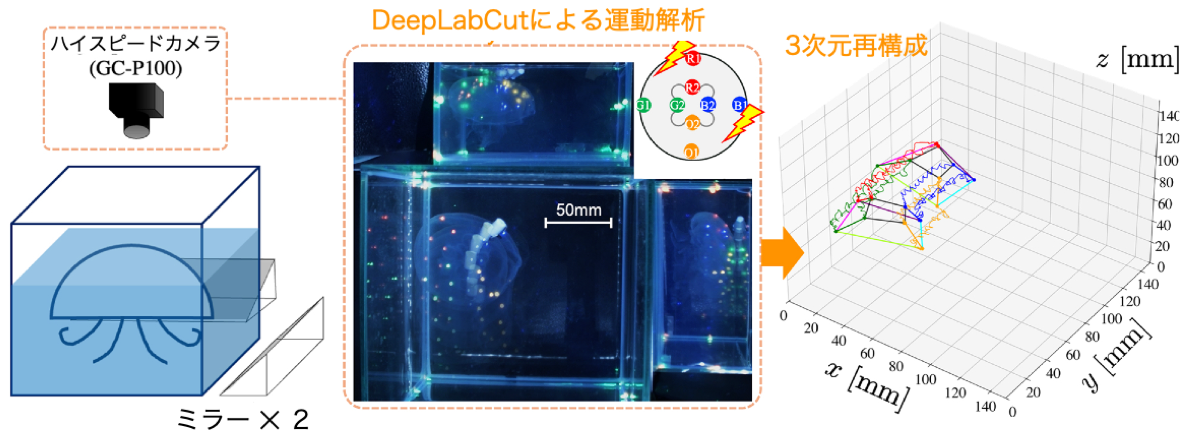
図2. 水槽中の3次元遊泳計測システム
関連動画
Harnessing Natural Embodied Intelligence for Spontaneous Jellyfish Cyborgs
謝辞
本研究はJSPS科研費 新学術領域研究JP21H00317、挑戦的研究(萌芽)JP23H00481、および公益財団法人JKA 2024年度 補助事業(2024M-364)(いずれも研究代表者:大脇大)の助成を受けたものです。また、本研究成果に関する論文は、「東北大学2025年度オープンアクセス推進のためのAPC支援事業」の支援を受けました。
用語説明
(注1)自己組織化臨界現象(Self-Organized Criticality)
自然界にしばしば見られる現象で、システムが外部からの細かな調整なしに自律的に臨界状態(小さな変化が大規模な反応を引き起こしうる状態など)へと移行する性質を指す。雪崩や地震の発生にも関連する概念。
(注2)筋肉
生物の運動を担う組織。ミズクラゲにおいては、傘の縁に存在する環状の筋肉が収縮と弛緩を繰り返すことで遊泳運動を生み出す構造。
(注3)電気刺激
生体組織に微弱な電流を流すことで、筋肉の収縮などを人工的に誘発する手法。医療や神経研究などでも用いられる技術。
(注4)ミズクラゲ
日本沿岸に広く分布する円形の透明なクラゲ。学名はAurelia coerulea。

(注5)物理リザバー(Physical Reservoir)
複雑な物理系を情報処理デバイスとして活用する枠組み。生体や柔軟構造物などが入力に対して動的応答を示す性質を利用する計算手法。
(注6)サイボーグロボット
生物と人工機構を融合させたロボット。生体の運動能力に外部からの制御装置を組み合わせることで、機能拡張や操作を可能にするシステム。昆虫サイボーグ(Sato et al. Front. Integ. Neurosci.,2009)、クラゲサイボーグ(Xu et al. Sci. Adv. 2020)など。
(注7)身体性知能(Embodied Intelligence)
身体の構造や環境との相互作用を通じて実現される知能。計算機による情報処理だけでなく、身体そのものが認知や行動に寄与するという考え方。
(注8)ソフトロボット
柔軟な素材で構成され、生き物のようにしなやかに動作するロボット。
(注9)パルス幅変調(Pulse Width Modulation: PWM)信号
電子信号のオンとオフの時間間隔を変化させることで、出力の強弱を制御する技術。照明の明るさ調整やモーター制御などに広く使用される手法。
(注10)モーションキャプチャーシステム
対象の動きを高精度で記録・可視化する装置。映画制作やスポーツ解析などにも用いられる。
(注11)DeepLabCut
深層学習を活用した人工知能(AI)技術を用いて、動物の身体各部の動きをマーカーレスで自動的に追跡・解析するためのオープンソースのソフトウェア。少量の学習データで高精度な動作認識が可能なツール。
(注12)自己組織化
個々の要素が外部からの命令を受けることなく、自律的に秩序ある構造や行動を形成する現象。自然界に広く見られる創発的なパターン生成の原理。
(注13)非線形動的システム
出力が入力に単純には比例せず、時間とともに変化する複雑な振る舞いを示すシステム。天気や生体運動など、自然界に広く存在する現象の記述に用いられる数理モデル。
論文情報
著者: Dai Owaki*, Max Austin, Shuhei Ikeda, Kazuya Okuizumi, Kohei Nakajima
*責任著者: 東北大学大学院工学研究科 准教授 大脇 大
掲載誌: Nature Communications
DOI: 10.1038/s41467-025-59889-7
※実験動物に関する倫理的配慮について
刺胞動物であるミズクラゲは国が定める実験動物には該当しませんが、本研究では、動物の苦痛の軽減、使用数の減少、代替法の活用(3R:Refinement, Reduction, Replacement)の原則に留意し実験を行っています。
