



2050年は暮らしの中に様々なロボットがいることが当たり前の社会となることでしょう。
多機能なロボットよりも単機能でも一人ひとりに合った支援をするロボットがたくさんいて、必要な時に手助けを受けることができれば
年齢や障がいの有無に関係なく、すべての人がもっと自由に行動することができるようになると思います。
私たちが創りたいのは人をやる気にさせ、活力を与えてくれるロボット群です。




皆さんはロボットと聞くと、どんな形のものを想像しますか?ロボットの形はさまざまで、お掃除ロボットや人と会話するロボットなど、私たちの身の周りにはとても多くのロボットが存在しています。
2050年までにはロボットがさらに社会の至るところにいて、当たり前のように暮らしの中でサポートをしてくれる時代が来ます。私が目指すのは人と共生し、活力を与えてくれるロボット達の開発です。ただ人の生活を助けるだけではなく、このロボットがいれば「起き上がることができる」「外に出られる」など、やる気を与えてくれるロボットの開発をしています。
そのような2050年を目指して、まずはもう少し近い未来の2030年に向けて介護施設で役立つロボットの開発をしています。介護施設で活躍するのは単機能でシンプル、だけど体格や運動能力が異なる様々な入居者の方に対応するロボットだと思っています。例えば、ベッドから起き上がるということをサポートするロボットが1台いて、そのロボットがそれぞれの入居者の体格や運動能力に応じてサポートの仕方を調整してくれれば、入居者が「起き上がりたい」と思ったときに人間のスタッフの手を煩わせることなく自分の力で起き上がることができますね。寝たきりではなく、自分の意志で体を起こして他の人と同じ目線になるというのは、そこから「立ち上がってみよう」「人とお話ししてみよう」というきっかけとなる、とても大事なことなのです。
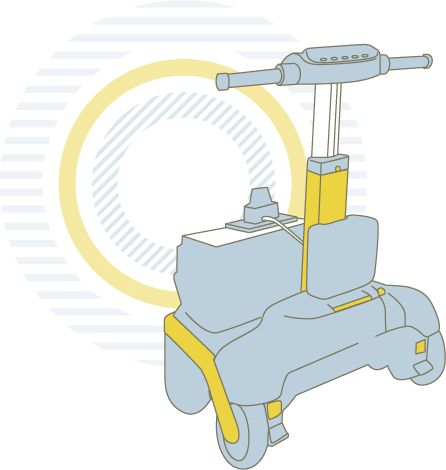
“安全なロボットを作る” これは、特に福祉ロボットにおいては最優先の命題です。例えば歩行器ロボットと聞くとモータを使ったパワーアシストなど、動力を使って何かを動かす“駆動”を連想することが多いかもしれません。しかし、安全性や人との親和性を重視すると、大切なのはむしろ“制動” 、人間や外から加えられる力をどうコントロールするかであると考えています。
歩行器ロボットの場合、利用する人間が歩行器に加える力に対して適度にブレーキをかけて歩行をサポートします。例えば下り坂では、そのままでは歩行器に体重をかけると歩行器だけが先に進んでしまい、利用する人が前のめりになって転倒しやすくなります。この場合、坂道の傾斜や人が歩く速度に応じて、歩行器に適切にブレーキをかけることがとても重要となります。
ロボットを動かすためにはモータが必要ですが、モータには誤作動のリスクもあります。モータの動きはプログラムでコントロールされますが、万が一プログラムにミスやエラーがあって、歩行器が予期しない動きをしてしまうようなことがあってはなりません。人に寄り添うロボットは、100%安全でなければならないのです。
この歩行器ロボットにはパッシブアクチュエータというブレーキシステムを使用しています。これはブレーキの部分に磁性流体や磁性粉体が組み込まれていて、電気を流して電圧をかけると流体や粉体が固まり、かけた電圧に応じたブレーキがかかる仕組みです。このシステムは産学連携において、介護ロボットだけでなく、様々なロボットの機能を再検討するきっかけにしていただきました。


これからの超高齢社会では、生活のすべてを支えるのではなく、人の様子を見守りながら、必要なときに必要な場所で、必要な分だけ人を支えるロボットが必要です。例えば「歩く」ということひとつを取っても、障がいや怪我の有無、体格や運動能力によって歩くスピードや歩き方、歩きづらさはそれぞれです。また歩行という生活するうえで基本となる動きだからこそ、他の人の手を煩わせたくない、自分の力で行いたいという気持ちが強い場合があります。そんなときロボットであれば、人間のように気を使う必要がなくなります。ロボットだからこそ気を遣うことなく、歩くための「道具」として利用できるということもあると思います。
また、障がいや加齢による足の筋力の衰えにより、足が動かしにくくなったからと言って、そのままにしていると、どんどん足は動かなくなってしまいます。例えば、被介護者の動きをモーションセンサーで検出し、その人の筋力や歩行の様子などを察知して、それに応じてどのくらい・どのように支援するかを瞬時に判断するAIがあれば、無理なくその人に合ったサポートをすることができます。

実は動かない、動かしにくいと思っている体も動かし方を工夫すれば動くようになることがあります。仙台の企業が開発した足こぎ車椅子は下半身麻痺の方でも使うことができ、自分の力で移動できるだけではなく、さらには足こぎ車椅子の利用を続けた結果、歩けるようになった方もいます。使わなくなった足を運動させることにより、筋肉がつき、関節の動きもスムーズになるわけです。自分の力だけで動けるということは気持ちの面でもやる気になります。だから、常に介護ロボットがそばにいるのではなく、必要な時に呼んだり自然と寄り沿ったりすることで、必要な場面・場所で必要な分だけ適材適所でアシストしてもらうのが一番よいのです。
例えば、ベッドから身体を起こして床に立ち、歩行器を使って居間まで歩いていくという一連の動作を一つのロボットでサポートしようとすると、複雑な機構が必要になり、ロボットは大きく重くなってしまいます。そうしたロボットは安全面での不安はもちろんのこと、高機能・多機能ゆえに、必要とする人の手に届かないほどの高価になってしまうでしょう。ですので、単機能のロボットの連携、例えば身体を起こすのは介護ベッドが担い、立ち上がる際には手すりや身体の支えとなるロボットがベッドのそばに来て、その人の体格や動作に合わせて高さや位置を変化させる。そして移動する際には歩行器ロボットが手の届く位置にやってくるというように、単機能のロボットが複数の群となって、連携しながら介護をしてくれる、それが私の提案する未来の介護のカタチです。



ムーンショット型研究開発プロジェクトにより、青葉山キャンパスにある私たちの研究室の隣に「青葉山リビングラボ」という介護施設を模したスペースを作りました。
ムーンショット型研究開発制度とは、社会課題に対してこれまでになかったイノベーションを目指し、従来技術の延長ではなく、全く新しい、より大胆な発想に基づく挑戦的な研究開発(moonshot)を推進する大型研究の国家プログラムです。
ムーンショットとはその名の通り「月への打ち上げ」のことです。これは1961年にアメリカのジョン・F・ケネディ大統領が1960年代中に月面着陸を成功させるという当時は実現困難なように思われたプロジェクトを1969年に達成していることに倣ったものです。実現困難のように思われるものほど、実現すれば社会に大きなインパクトを与えます。社会課題を対象にした目標で、さらにこれまでにはなかったような目標を掲げた研究開発制度であるため、「ムーンショット型」と名付けられました。
私はこのムーンショット型研究開発制度により、2050年のロボットとの共生社会の実現を目指します。私が目指すロボットはただ人を支援するだけでなく、人に活力を与えることのできるロボットです。「青葉山リビングラボ」は厚生労働省の介護ロボットの開発や普及に関する事業にも採択されており、介護の現場でロボットがどのように活躍できるか、という実証実験ができる設備となります。



現在、研究開発を進めているのは声で呼ぶことのできる車椅子や歩行器と、声に反応して体を起こしてくれたり、高さが変わったりするベッドです。既存の電動車椅子やパワーアシスト歩行器にセンサーをつけることにより、障害物や歩行者にぶつからずに目的地までやってくることができます。介護施設であれば、1人に一台ではなく、施設に数台あって、必要な時に必要な方に対して使うことができます。
これらのロボットは青葉山リビングラボ内で実験をした後、愛知の国立長寿医療研究センターにて、実際に高齢者や障がいを持った方に使っていただくことで、さらに使いやすいロボットを目指していきます。
本計画ではまずは2030年までに介護施設で運用することを目指します。介護施設では入居者の状態は様々です。一人ひとりの状況に合わせた介護が求められますが、マンパワーが足りない施設もあります。例えば、医療現場では患者さんや退院後の方にできるだけ運動をしてほしいと思っていても、実際の介護現場では運動の介助をするための技術や人手が不足していたり、「怪我をさせたくない」という想いから家族が運動をさせることに対して消極的になることがあったりします。医療機関、介護者、被介護者、そしてその家族に寄り添って、その人に合わせた支援を行うことができるロボットを実現できればと思っています。
介護ロボットに携わるようになって気づいたのは、当たり前のことですが、障がいや加齢の度合いによって、できること、できないことは十人十色だということです。例えば、体の片側のみに麻痺が起きている方はまっすぐ歩行することが難しいです。しかし、その片側の力をサポートしたり左右のバランスを取りやすくしたりする歩行器さえあれば、その方は自分の力で歩くことができるのです。



青葉山リビングラボは未来の介護施設を模擬した実験施設であり、様々な立場の人たちが介護について議論ができる場にしたいと思っています。我々エンジニアと、施設で働く介護士や理学療法士・作業療法士の方、そして介護機器を作るメーカーの方が「よりよい介護現場とはなにか?」「そこに必要なものはなにか?」を共に考える場でありたいと思っています。
また、東北Kaigo-Tech実践研究会という研究会を立ち上げ、東北ならではの介護の課題に取り組んでいきます。例えば、東北地方は冬が長く、雪が深い場所があったり、集落と集落の距離が遠かったりするため、その地域の特性に合わせた支援の形、それに沿ったロボットや仕組みが必要です。
私たちは実際に使ってもらい、役に立つロボット、そして、人に寄り添い、やる気にさせるロボットを様々な人々と連携しながら開発し、未来の社会の課題解決に挑んでいきます。



研究キーワード
ロボティクス 人間・ロボット協調 複数ロボット協調 産業用ロボット AIロボット
1998年 東北大学工学部機械知能工学科卒業、2000年 同大学院工学研究科機械知能工学専攻修了、博士(工学)。2000年 東北大学大学院工学研究科助手、2002年-2006年 科学技術振興機構さきがけ研究21研究員(兼任)、2006年 東北大学大学院工学研究科助教授(2007年より准教授に名称変更)、2016年より東北大学大学院工学研究科教授。
2020年よりムーンショット型研究開発プロジェクト目標3プロジェクトマネージャー。